
|
| |
|
Главная
>
Управление конечномерными объектами результатом § 26, имеем ~z{t) A z {t), s(0= [А - KB]2{t)-~p- z it). Отсюда сразу следует, что собственные чис;[а замкнутой системы есть собствешшо числа системы со стационарной обратной связью по состоянию (матрица [А - В К]) плюс собственные числа идентификатора (матрица А). Это следует из представления матрнцы системы (2) в виде МО МО J > \А - ВК] Эта теорема завершает исследование задачи конструирования устойчивого регулятора нулевого состояния. Рассмотрим подробно ряд примеров конструирования асимптотически устойчивых регуляторов. Пример. Два интегратора, охваченные положительной обратной связью, имеют следующие уравнения; 1 - ai У [1 0]. Согласпо теореме 1 для этой системы можно выбрать цепь обратной связи, содержащую два динамических элемента, и такую, что замкнутая система 4-го порядка будет иметь произвольно заданный характеристический многочлен. Это можно сделать потому, что система является управляемой и идентифицируемой. Коэффициенты цепи обратной связи вычисляются по формулам (1). Структура этого регулятора приведена на рис. 27,2. Согласно теореме 2 для этой системы можно выбрать обратную связь первого порядка такую, что замкнутая система будет иметь произвольно желаемый характеристический многочлен 3-го порядка. Построим такой регулятор. 1. Вычислим характеристический многочлен матрицы А ФА (Я) = Я - 1; tti - О, 2 = - 1- 2. Зададимся многочленами; фу (Х) ~ Х X -\- и ф {X) = X + Р, которые характеризуют динамику системы, охваченной стационарной обратнойсвязью по состоянию, и динамику идентификатора состояния соответственно. 3. Так как пара матриц {А, Ь} имеет каноническое представление, то компоненты вектора к сразу вычислим по формулам 1 = 72 - 2, 2 7i - i > следовательно, 4. Теперь необходимо перейти к базису, в котором пара {Ау с} имеет идентификационное каноническое иредстав-лепие. Переход к идентификационному каноническому представлению осуществляется с помощью матрицы 1 о1 Р1 = преобразование с помощью этой матрицы всех матриц системы дает: А: - РАР- =. Ь : РЬ - с:= сР-1 - [О 1], к:= кР-1 - [Yi- 72+1]- 5. Остается преобразовать матрицы системы {А, Ь, с, к} с помощью преобразования 1 -. 1 3 О 1 ,0 1. Б результате получим матрицы регулятора вида А: = А р О 1 - 3 ~ -Ь 1 1 3
b : = РЪ = к: =кР-1 = [Г1, 72 + 1] с : = ср-1 - [О 1] 1 Р О 1 1 р ! О 1 -[Г1>?Т1 + (Т2 + 1)], - [О 1]. На рис. 27.3 приведена структурная схема обратной связи вместе со структурной схемой объекта. На рис. 27.4 тот же регулятор изображен в соответствии с общей схемой рис. 27.1. Стабилизация неустойчивого объекта 4-го порядка. Рассмотрим задачу выбора параметров регулятора для
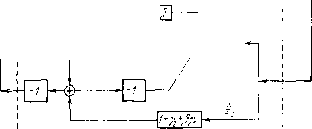 Pnc. 27 3. 0 M\ cocmoQHjp Д иобратиая сЗяь .7,- Рис. 27.4.
Рис. 27.5.
|