
|
| |
|
Главная
>
Управление конечномерными объектами которое в точности совпадает с уравнением (13). Поэтому, если выполнены условия теоремы 3, то ошибка слежения будет приближаться к нулю асимптотически, и значит, система будет обеспечивать высокоточное слежение за командным сигналом при любой помехе. Структура получаемой следящей системы представлена на рис. 31.1. Основными элементами этой системы являются идентификатор командного сигнала и идентификатор помехи и состояния объекта. Пример. Рассмотрим подробно простой пример конструирования линейной системы. Пусть дан объект 2-го порядка 1-2 {t)\ y{t)li 0] го 1 -9 -1 1 (О XI (t) х2 (0J u(0+ , w(0, (26) где у (t), и (t). w (t) - скаляры. Допустим далее, что помеха w (t) исследована экспериментально и что она состоит иа временных интервалов, на которых помеха равна неизвестной постоянной, и интервалов, на которых она равна линейной функции времени с неизвестным углом наклона. Общая формула такой помехи имеет вид ш (t) = 1 + at, (27) где 1, 0 - неизвестные постоянные, которые могут скачком меняться совершенно произвольным образом. Ранее мы видели (см., например, § 10), что сигнал ш (£) такого вида появляется на выходе динамической системы, состоящей иа двух интеграторов. Поэтому в качестве фиктивной динамической системы, генерирующей сигнал по-мехи, примем уравнение!
я = [1 0]. Пусть, далее, командный сигнал имеет вид г/к (t) = Yi + yU (28) (29) где 7i, Ya ~ неизвестные постоянные, которые могут меняться скачкообразно в произвольные моменты времени. 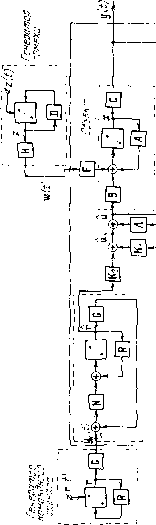 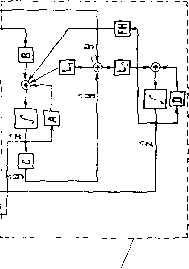 Таким образом, сигнал помехи w (t) может, вообще говоря, в точности совпадать с командным сигналом г/к (f). Будем считать, что фиктивная динамическая система, генерирующая сигнал (29), совпадает с системой (28). так что В = D, а G - Н. Задача состоит в конструировании управляющего устройства в виде обратной связи такого, чтобы выход объекта (26) точно отслеживал любой командный сигнал ?/к (t) вида (29). Кроме того, система доллша удовлетворительно работать прн любой помехе w (t) вида (27). Начнем с выбора матрицы Л, удовлетворяющей условиям теоремы 1. Необходимо проверить условие (7), которое имеет вид [1 01 [В АВ\ - О, (30) -9 -1 и л - искомая матрица. Нетрудно видеть, что условию (30) можно удовлетворить, если, например, выбрать Л - [1 0). При этом выборе имеем S = О, и управление Mn(0 обеспечивающее инвариантность выхода но отпошению к помехе, пмеет вид un{t) = -[i 0] 21 (О 12 (OJ - -i(0 где Zi [i), (t) - переменные состояния помехи. Следующий шаг заключается в выборе матрицы G, удовлетворяющей условию теоремы 2. Для нашего примера уравнение для G имеет вид [1 01 - [1 0]в. Ясно, что выбор G -- 1 является удовлетворительпым. Теперь необходимо выбрать матрицу К- так, чтобы переменная t, (t) ~> О, где t, (t) удовлетворяет уравнению -9-j-ftii f fc]JLC2(0, Необходимо выбрать к, к так, чтобы все решения этой системы стремились к нулю. Например, можно выбрать величины k-ii и к- так, чтобы оба собственных значения \2 Ю, Н Андреев
|