
|
| |
|
Главная
>
Управление конечномерными объектами При большой размерности пространства состояний процедура вычисления передаточной фупкциис помощью структурных преобразований может быть существенно проще, чем операция обращения матрицы бо.тьшого порядка. Задача определения представления системы в пространстве состояний по известной передаточной функции Рис. 14.4. является более сложной, чем обратная задача, из-за произвола выбора переменных состояний. Однако с этой задачей знаком каждый инженер, которому приходится моделировать системы регулирования на аналоговых ЭВМ. Рассмотрим решение этой задачи для системы с одттим входом и одним выходом, имеющей передаточную функцию вида p + iP +...+aip+o Соответствующее этой передаточной функции диффе рентщ ал ьное уравнение двилеиия системы мппшо записать в виде {t) + anyi- ) (t)-\-. . . f tto=- Здесь у (t) - выход системы, а и (t) - вход. Чтобы перейти к описанию системы в пространстве состояний, заметим, что это уравнение эквивалентно системе п линейных дифференциальных уравнений 1-го норядка вида (ЛС), если переменные состояния определить равенствами: 1 (О - у (0. 3 (i) = У i) - (t), 3 (О - У() - (t) b.,u{t), Хп (t) = (t) biu(-- (t) - . . . - u{t), в которых постоянные bi {i = i, 2, . . . , n) связаны с коэффициентами передаточной функции с помощью рекурсивных соотношений: = hj i, = /-з - in-i, п-2 n-l Ьп-1 = 1 - S = - S Ii- 1=1 i= 1 Нетрудно проверить, что при таком выборе переменных состояния матрицы системы имеют вид г- bl -п
п - п-1 J с= [1 0... 0]. Структурная схема моделирования этой линейной системы представлена на рис. 14.5. Рассмотрим примеры. 1. Пусть дан объект управления it {t) = и [t). Это может быть, например, механическая частипа единичной массы, на которую действует сила и [t). Запись уравнения объекта в переменных состояния получим, вводя переменные: X = Xi, X = Х2. Тогда уравнение объекта сведем к системе двух линейных уравнений г-1 (t) = д-2 (О, X, it) = и (t). Если в качестве выхода системы рассматривать положение частицы то -у = Xi и матрицы системы А, В, С имеют вид
, с = [101. Уравнения системы в подробной записи: it). Xi (t) о OJ [:сз (0. u{t), (0- [1 01 Структурная схема этого объекта представляет собой два последовательно включенных интегратора (рис. 14.6). 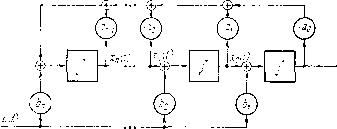 Рис. 14.5. Рис. 14.6. 2. Рассмотрим камерную нагревательную нечь, разделенную на три зоны регулирования. Пусть температура каждой из зон а:; (г = 1, 2, 3) связана с расходом топлива в зоне Ui (t) (i = 1, 2, 3) уравнением = -~ага;г(0 + г11(0 + га з(0 + 13з(0 J = 1, 2, 3. Здесь коэффициенты bij описывают влияние расхода топлива /-Й зоны на температуру в г-й зоне.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||