
|
| |
|
Главная
>
Управление конечномерными объектами АСИМТОТИЧЕСКИВ ИДЕНТИФИКАТОРЫ Асимптотический дифференциатор. Типичной задачей теории линейных систем является задача конструирования дифференциаторов. Оказывается, что эта задача сводится к только что рассмотренной нами задаче идентификации состояпия стационарной .чипейной спстемы. 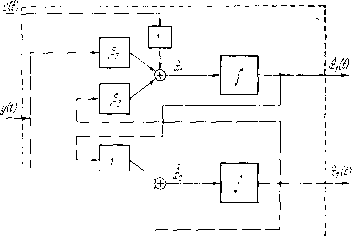 Рис. 25.4. Определение 3. Линейная система с одним входом называется асимптотическим дифференциатором порядка /г - 1, если при всех и (О й имеем г = 0,1, 2,..., ft - 1, каждое [t) -> О при оо. Q Пусть задана функция и [t) Q, где Q - пространство многочленов от t степени не выше ft - 1 с коэффициентами из R. Тогда справедлива Теорема 2. Асимптотический дифференциатор порядка п ~ iy являющийся п-мврНой системой, сугце-ствует. Доказательство. Дело в том, что входные воздействия и {t) можно рассматривать как выходные величины t/ (£) - U {t) линейной системыri-ro порядка, описываемой матрицами
с = [0. ..о 1], В = 0. Действительно, вычисляя переходную матрицу этой системы, получим fc=0 О 0 0 О L (n-i)] t 1 Таким образом, функция у(0 = сх(0 = еФ(г,0)х(0) является многочленом. Другими словами, любой многочлен может быть получен в качестве выходной величины у {t) системы {А, с) за счет подходящего выбора начального состояния X (0). Так как система (Л, с) полностью идентифицируема, то согласно доказанной теореме можно построить систему оценки ее состояния, а динамику стремления оценки (t) к состоянию х {t) моясно выбирать совершенно произвольно. Система с многими выходами. Пусть линейная система X (О = Ах (О + fiu(0, у (О = Сх (О, (ЛС) где А, В, С -~ матрицы п X п, пХт, рХп{р1) соответственно, имеет много выходов. По аналогии со случаем одного выхода рассмотрим -мерную динамическую систему - идентификатор, на вход которого поданы входы системы (ЛС) и, кроме того, сигнал рассогласования между выходами этой системы и выходами системы (ЛС) с коэффициентами усиления, заданными с помощью матрицы L. Уравнения этой системы имеют вид х(0= Лх(0 + и(0 Ь\у{) У(0 = Х(0. Cx{f)] Здесь L - матрица размеров п X р. Вводя невырожденную замену переменной х (t) = х (/) - х (t), мы получим уравнения для рассогласования ме?кду состоянием системы (ЛС) и выходом идентификатора (1) в виде X (t) = U - LC] X (t). Поскольку пара матриц {Л, С] является идентифицируемой, то пара {Л, С} управляема, и значит, найдется такая матрица L, что характеристический многочлен матрицы [А - CL] совпадает с любым заданным вещественным многочлепом фи (Я). Поскольку характеристические многочлены матриц 1А - LC\ н [А - СL] совпадают, то мы получим следующий результат. Теорема 3. Для линейной идентифицируемой системы с многими входами (ЛС) существует п~мерный идентификатор состояния вида (1), причем характеристический многочлен матрицы [А - LC], корни которого определяют характер стремления ошибки идентификатора к нулю, может бить произвольным вещественным многочленом ф (к) = А, -f PiV -f + Рп* О Из сказанного ясно, что для вычисления неизвестных параметров идентификатора (матрицы L) по заданным динамическим свойстЦМ (многочлен фи (А,)) можно воспользоваться алгоритмом выбора матрицы обратной связи, приведенным в § 23. Задачи. 1. Постройте идентификатор состояния для пары матриц -1 П О 1п П 1 о 1 0 0 10 о о 1 о 4 0 0 1 0 10 1 который имел бы следующие соботвеииые числа: Я. = = -3, Я.3 = Я. j = - 1. 2. Постройте устойчивый 4-мерный идентификатор состояния, все характеристические числа которого равны 1, для системы с одним входом и одним выходом, передаточная функция которой имеет вид P(P + i){P-\-2] (p-j-2)
|
|||||||||||||||||||||