
|
| |
|
Главная
>
Управление конечномерными объектами 288 Идентификаторы состояйий [гл. v Обозначим столбцы матрицы следующим образом: = [eu, ei2,..., еца, eai, egg, . .esi, ..., вцл, ..., вр.]. Поскольку QQ~ = Е, то но определению выполняются следующие условия: f 1, если i = I л j = q CiA%ii = \ (4) I, 0 в противном случае. Теперь примем в качестве базиса пространства состояний набор столбцов [ei(ij, Лбцл, ...,А ei(ij, eijug, Эти столбцы линейно независимы. Докажем сначала, что линейно независимы столбцы [eii., Ai, . . ., Л IcJ-Предположим, что существует нетривиальная линейная комбинация этих столбцов. Например, deiy.. 4- ааЛе,. -)-... + а.а~%к = 0. Умножив это равенство слева на строку с, получим {(XiCi + адЛ Н-----1- а1л.СЛ ) ецк = О, но efi. 7 0. Значит, линейно зависимы строки набора (3) Полученное противоречие доказывает, что столбцы ех1л., лецк,..., Л eifji. линейно независимы при любом i = 1, 2, р. Вспоминая, что столбцы Cifi , 6214, . . ., epip линейно независимы по построению, легко видеть, что все столбцы набора (5) линейно независимы. Образуем из этих столбцов матрицу Р~ = [eit, Aei,..., Л ер(хр] и выберем столбцы этой матрицы в качестве базиса пространства состояний. Приведение матрицы С к этому базису в соответствии с формулой С: = СР~ приводит К следующему виду уравнения наблюдения:
При вычислении С мы воспользовались формулой (4). Б новом базисе уравнение х (t) = Ах (t) + Ви (t) примет следующий вид; ±21 i-32 0 * 0 *; * 1 *: *0 0 ... 0 *: *i 1 0 . . . 0 *i *!0 0 ... 1 ♦! x-h-Bu, *! [0 0 ... 0 * *: ; 1 0 ... 0 * . 0 0 ... 1 - где знаком * обозначены, возможно, ненулевые элементы матрицы. Приведенную систему уравнений можно, очевидно, рассматривать как совокупность р систем уравнений, каждая из которых имеет много входов и единственный выход. Структурная схема полученного канонического представления приведена на рис. 26.2, Каждая из р систем имеет следующий вид: -Ь D,y + BiU, (6)
Здесь Di и Bi ветственно. г/ = [0 0. . . О Их матрицы размеров р.; X /? и р X m соот- 10 Ю. и Андреев Используя полученное каноническое представление, можно непосредственно применить к системе с многими выходами результаты, полученные при построении идентификаторов для системы с одним выходом. Для каждой подсистемы (6) можно построить асимптотический идентификатор размерности р; - 1. Следовательно, размерность 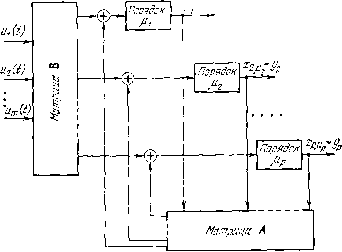 Рис. 26.2. идентификатора системы равна сумме размерностей р идентификаторов для систем (6): 2(Pi -1) = /г--/). Эти Идентификаторы дают на своих выходах п - р оценок переменных состояния. Выходной вектор системы доставляет еще р оценок. Характеристический многочлен каждого из р идентификаторов согласно доказанному ранее результату (теорема 1) можно выбирать по своему усмотрению. Единственное ограничение, связанное с реализуемостью системы, состоит е том, что этот многочлен должен иметь действительные коэффициенты. Поэтому, если ком-
|