
|
| |
|
Главная
>
Управление конечномерными объектами ИДЕНТИФИКАТОРЫ состояния [гл. V Рассмотрим теперь задачу конструирования идентификатора {п - 1)-го порядка для системы х {t) = Ак (t), у {t) = сх (f), где {А. с} представлены в виде (ИКП). Если уравнения идентификатора имеют вид 00... 1 о ... -р. 0 О ... -р. z(t) -о . . 3 (а-р)-а то решением уравнения ТА - DT = S будет матрица 1 О ... О - 0 о . . . 1 - размеров (п - 1) X п.. В этом случае оценки переменных £г получаются из переменных Zi по следуюп1;им формулам: Поскольку коэффициенты можно выбирать но своему усмотрению, то динамические свойства идентификатора по-прежнему могут назначаться произвольно. В общем случае, условие идентифицируемости системы гарантирует существование матриц D (с произвольно заданным харан-теристическим многочленом) и Г, Q, удовлетворяющих уравнение ТА - DT QC та таких, что выходы идентит фикатора % [i) дают оценки всех компонентов вектора со стояний. Рассмотренный подход позволяет, таким обра-зом, выяснить алгебраическую сторону проблемы конструи рования идентификатора. Пример 2, Пусть матрицы системы имеют вид: -2 1- с = [1 Oj. Выберем собствелное значение идентификатора А, = -3. Тогда уравнение идентификатора пмеет вид 2(0--=-Зз(0 + [1 0] ж1 {t u{t). Пусть Z [t) = Tx {t), где Т является решением уравнения Решение этого уравнения имеет вид Т = числим ГЬ
. Вы- =--Окончательно уравне- ние идентификатора получим в виде и z{t)x,{t)~-x.,{t). Структурная схема данной системы и построенного идентификатора приведена на рис. 26.3. 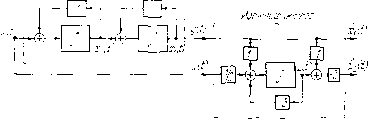 Рпс. 26.3. Еще один сиособ построения {гг - р)-мериого идентификатора. Пусть в уравнениях (ЛС) в условиях теоремы 2 матрица С имеет ранг р. Выберем в качестве новых переменных состояния р линейных комбинаций компонент вектора х (), задаваемых уравнением наблюдения системы, и еп],е {п - р) линейно независимых комбинаций компонент X (t), заданных равенством z {t) = Lx {t), где L - матрица (г* - р) X п, строки которой ливойпо независимы. Проведенную замену переме1П1ых можно записать так:
K{t) = Px{t). (12) В соответствии с выбором L это - невырожденная замена переменной, и матрица Р имеет обратную. Поэтому Подставляя новые переменные в уравнения системы, получим у {0-1 = РАР -lit) -hPBaitl или, разбивая матрицы PAP и РВ на блоки, имеем и(0. (*)
Из этого представления следует, что уравнение для переменных Z (t) имеет вид i{t) = a z{t) + Ay{t)B,u{t)- Возьмем в качестве уравнения оценки вектора z [t] уравнение Z (О aJ (t) Jr А,уУ {t) + В,а (О, Z (0) 0. (13) Тогда ошибка оценки z {t) = z (t) - z (t), как нетрудно видеть, удовлетворяет уравнению z(0 = Azit), z(0) = z(0)-z(O). Если матрица A устойчива, то ъ {t)О ири t-oo. Таким образом, оценка вектора состояния системы (ЛС) определена равенством x(t)p- 1-.-
|