
|
| |
|
Главная
>
Периодические сигналы длительность функции памяти в первом случае несколько больше, чем во втором. К тому же, функция памяти время - вариантного фильтра имеет участок с крутизной в два раза большей, чем у время - инвариантного фильтра. Следовательно, можно ожидать, что шумовые свойства время - вариантного фильтра будут хуже как для параллельных, так и для последовательных шумов. Действительно, простые расчеты дают для этого фильтра значения включение интегратора выключение итегратора При оптимальном значении г для каждого фильтра и одном и том же источнике сигналов (и шумов) время - вариантный фильтр имеет более высокий уровень шумов (на 45 %), чем аналогичный время - инвариантный фильтр. Если ключ активного интегратора замыкать только на время существования одной полуволны, скажем, положительной, сигнала дифференциатора (рис. 5.12, а), то функция памяти такого фильтра будет иметь треугольный вид и, следовательно, шумовые свойства такого фильтра будут такими же, как у время - инвариантного треугольного фильтра. Вид переходной функции и функции памяти показан на рис. 5.12, б, в. Рис. 5.12 Фильтр RC-CR + управляемый интегратор Вопрос о шумовых свойствах такой структуры возникает естественным образом как только дело доходит до измерения амплитуды сигнала с выхода фильтра с помощью какого-либо аналого-цифрового преобразователя (АЦП). RC-CR фильтр здесь выбран в качестве примера. Дело в том, что входные цепи любого АЦП имеют конечное быстродействие, что эквивалентно дополнительному интегрированию. Более того, часто для измерения амплитуды сигнала после фильтров используют ЗЦП (зарядо - цифровые преобразователи), измеряющие заряд, поступивший на их вход в течение сигнала управления. Сигнал управления подается в момент достижения измеряемым сигналом максимума (рис. 5.13). Здесь td и tg соответственно задержка и длительность сигнала управления. Вычисления шумовых индексов для рассматриваемой ситуации довольно громоздки. Рассмотрим и прокомментируем лишь конечные результаты, которые приведены в таблице 5.1. 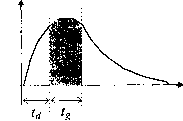 Рис. 5.13 Таблица 5.1
За единицу принят уровень шума обычного RC-CR фильтра при оптимальном значении постоянной времени г = Тдр,. Видно, что уровень шума системы RC-CR + управляемый интегратор по отношению к обычному RC-CR фильтру имеет пологий минимум (-13%) при t/r- 1,7 и равен 1 при t/r =0 и /g/r = 4,2. Заметим, что t/т = О соответствует измерению сигнала в точке. Что касается td, то её величина определяется условием получения максимума сигнала при заданной величине [5.2.12] Если т/Topt = 0,2 , то при г/г= 2,5 относительный шум равен 1. Это означает, что можно существенно уменьшить длительность импульса фильтра без ухудшения шумовых свойств. Оптимальный фильтр 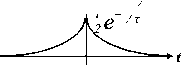 Рис. 5.14 же вид. С точностью до множителя Как было показано ранее [5.1.5], переходная функция оптимального фильтра имеет вид (рис. 5.14); в силу симметрии функции относительно максимума (момента измерения) функция памяти имеет точно такой такой же вид имеет и её производная. Прямое вычисление шумовых индексов дает: 00 rdt = г. [5.2,13] [5.2.14] Таким образом, оптимальный фильтр при тех же условиях имеет лучшее отношение сигнал/шум (на 36 %), нежели CR-RC фильтр. Уровень шума оптимального фильтра при сравнении с другими фильтрами принимается за единицу. К сожалению, теоретически оптимальная CUSP-форма не может быть реализована практически. Наилучшим с технической точки зрения приближением является симметричная колоколообразная (гауссова) форма, которая может быть реализована при использовании большого числа следующих друг за другом интегрирующих RC - цепочек. Именно такие фильтры предпочитают использовать в больших многоканальных детекторах, когда оптимизированные под конструкцию конкретного детектора временные параметры фильтров и коэффициенты усиления далее остаются неизменными. Универсальные фильтры, предназначенные для работы с разными источниками сигналов, строятся, как правило, с использованием
|
|||||||||||||||||||||||||||||