
|
| |
|
Главная
>
Приборостроение схемы приборов с цифровым-выходом Принципы построешя и основные структурные схемы цифровых измерительных приборов достаточно подробно рассмотрены в ряде монографий (Л. 1-7]. Поэтому здесь очень кратко описаны наиболее распространенные структурные схемы. ПОРАЗРЯДНОЕ УРАВНОВЕШШ(АНИЕ Поразрядное уравновешивание широко применяется в неавтоматических потенциометрах и мостах, которые ino существу являются цифровыми приборами с ручным уравновешиванием. Структурная схема поразрядного автокомпенсатора показана на рис. 1. Прибор состоит ПЗ измерительной схемы (входная цепь, нуль-орган п многоразрядная уравновешивающая цепь) ;и управляющего автомата с цифровым отсчетным устройством. дход 0- Входная и,епь Нуль - орган УраОиовесаавающая цепь ееаст /Распределитель (Р) Генератор а МПС/ль со б Упрабляюсцай цидзробой автомат Цидоробое отсчетное устройство Рис. 1. Входная цепь преобразует измеряемый сигнал и производит алгебраическое сложение его с уравновешивающим сигналом. В качестве нуль-органа обычно используется усилитель с большим коэффициентом усиления. Он определяет знак отклонения от состояния равновесия ( перекомпенсация или недокомпенсация ). По командам нуль-органа цифровой автомат переключает ячейки памяти, которые в свою очередь управляют работой уравновешивающей цепи. При использовании двоичного кода процесс уравновешивания протекает следующим образом. Распределитель Р по очереди опрокидывает триггеры всех разрядов, начиная со старшего. При этом на выходе уравновешивающей цепи, управляемой триггерами цифрового регистра, создаются напряжения: 2-1А6ур, 2-2Д[;ур,. ..,21А6ур, 20А6ур, где /г -число разрядов; Абур - величина уравновешивающего напряжения, соответствующая младшему разряду. Сумма получаемых таким образом напряжений сравнивается с измеряемой величиной Ux, Если эта сумма больше измеряемого напряжения, то нуль-орган дает разрешение на сброс последнего триггера, -вызвавшего перекомпенсацию. Если набранная сумма (меньше измеряемой величины Vx, то нуль-о)ган запрещает сброс последнего включенного триггера цифрового регистра. К концу цикла работы распределителя в исходном состоянии о окажутся триггеры тех разрядов, включение которых вызвало перекомпенсацию, а состоянии 1 будут находиться триггеры разрядов, сумма напряжений которых обеспечила наилучшее приближение к измеряемому сигналу Ux. Результирующее напряжение на выходе уравновешивающей цепи при включении п-го двоичного разряда равно: где Xi - коэффициент, равный пулю или единице, в зависимости от результатов сравнения. Предположим, что Ux = S,2 ед., Af/yp=l, число разрядов /г=6. В этом случае схема (рис. 1) работает следующим образом. Первым шагом распределителя включается триггер регистра, соответствующий выходному напряжению уравновешивающей цепи Таблица 1
2-986 6ур = 2 = 32 ед., затем - триггер, соответствующий напряжению Lyp = 24=il6 и т. д. Процесс уравновешивания поясняется табл. 1 и рис. 2. Полученный в результате уравновешивания код 10М01 является числовым эквивалентом измеряемой .величины и в десятичной системе счисления соответствует числу 45. СЛЕДЯЩЕЕ УРАВНОВЕШИВАНИЕ Цифровой прибор поразрядного уравновешивания превращается в следящий, если в схеме рис. I регистр и распределитель заменить реверсивным счетчиком импульсов. Команды реверсирования вырабатываются нуль-органом. Следящие приборы отличаются от приборов циклического действия тем, что после достижения компенсации и срабатывания нуль-Органа счетчик не возвращается в исходное состояние. При этом установившееся положение счетчика соответствует измеряемой величине в данный момент времени. Прибор отрабатывает изменения входного сигнала; при этом уравновешивающее напряжение меняется вместе с измеряемой величиной Ux. Уравновешивающая цепь создает напряжение Lyp, соответствующее состоянию реверсивного счетчика импульсов и выходному коду. В зависимости от соотношения Ux{t) и ур на 1Выходе нуль-органа Изменяется полярность напряжения. Если Ux(t)>Uyp, то счетчик включается для прямого счета (суммирования); если Ux{t)<Uyp, то счетчик работает на вычитание. РАЗВР.РТЫВАЮЩЕЕ УРАВНОВЕШИВАНИЕ Цифровой прибор поразрядного уравновешивания превращается в прибор с развертывающим уравновешиванием, если в схеме рис. 1 регистр выполнить в виде нереверсивного счетчика импульсов. Значительное распространение получили также приборы развертывающего уравновешивания с промежуточным преобразованием измеряемой величины во временной интервал. Принцип их действия поясняет рис. 3. В момент ti срабатывает один нуль-орган, в момент /г - второй. Интервал времени (1, /г) заполняется импульсами. Их общее количество пропорционально разности {Uxl~Ux2). На принципе интегрирования сигнала р с время-импульсным преобразованием вы- полняются цифровые приборы, измеряющие среднее значение напряжения за постоянный промежуток времени Гц (интегрирующие вольтметры). Струкд турная схема прибора, построенная по этому принципу, представлена на рис. 4. Схема содержит интегратор с ключами Ki и Кг, нуль-орган НО, блок управления, генератор импульсов, ключ Кз, счетчик с цифровым отсчетным устройством. Цикл работы прибора состоит из двух тактов. В первом такте ключ Ki подключает к интегратору измеряемое напряжение U. 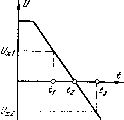
|