
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание 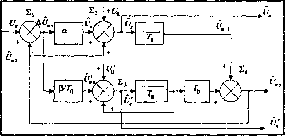 конец, широко применяется метод скользящего сглаживания параметров траектории, в котором память фильтров ограничивается за счет замораживания коэффициентов сглаживания, а просмотр траектории производится в скользящем окне. На рис. 15.2 показана структура так называемого а-Р-фильтра для скользящего сглаживания параметров траектории, близкой к траектории прямолинейного равномерного движения. Входными сигналами сглаживающего фильтра являются последователь-Рис. 15.2. Структура а-р-фильтра ности отсчетов Ц, и начальные значения параметров 6о и О которые вводятся в фильтр в момент /о до начала сопровождения. На выходе фильтра получается сглаженное значение координаты U, сглаженное значение скорости изменения координаты и и экстраполированное значение координаты ,отнесенное к моменту / . На сумматоре Si пол)чают разность между наблюдаемым и экстраполированным значениями координаты. Затем суммируют экстраполированное значение координаты и взвешанное значение сигнала ошибки в сумматоре В начальный момент сумматор использует исходное значение координаты. Оценка скорости изменения координаты производится на сумматоре S3. Для этого из памяти фильтра берется значение скорости в предыдущий момент и сигнал ошибки с весом р/Го. Для начала процесса сопровождения необходим ввод значения скорости. Сумматор S4 по предыдущим значениям координаты и ее скорости вычисляет экстраполированное значение координаты. Синтез оптимального фильтра сглаживания (оценки) проводится с использованием функции правдоподобия L(&). В нашем случае эта функция для п-мерной выборки коррелированных нормально распределенных случайных величин в матричном представлении имеет вид Цв) = Cexp-ARKAR ] Удобнее иметь дело с натуральным логарифмом функции правдоподобия: 1пЦ0) = 1пС-ARK-AR . (15.11) Для нахождения оценок продифференцируем (15.11) по 0: A(arTk-ar) = 2 для де KAR. (15.12) Полагая 0 = 0 и AR= R- R{t,&), приравниваем производную нулю: Ri@J) д© R-R(&,t) = 0. (15.13) Поскольку R(@,t) ставим в виде матрицы: является вектор-строкой, производную пред- R(@J) = А . Векторное уравнение правдоподобия имеет вид АК R-R(@j) Если обозначить /?(©,/)= А0 и .Л.К~А = В , то решением этого уравнения будет соотношение 0 = B AK R. (15.14) Алгоритм обработки получается при конкретизации статистики помех п и R. Точность измерения параметров траектории зависит от корреляционной матрицы вектора 0 : = Л/{ (0 - Л/0)(0 - 0) } = Л/{ (0 - 0)(0 - 0) }. Поскольку R=Ae44 ~ вектор пофешностей измерений) и 0-0= В, то = В В. Обычно матрица К симметрична относительно диагонали и, следовательно, =(АК~А) . Если использовать многомерный фильтр Калмана, то его алгоритм и структура находят путем конкретизации оптимального соотношения рекуррентной фильтрации. Без вывода приведем результаты такого синтеза. Пусть v-мерный вектор состояния в+1=(0,а+1, .©v.a+i) задан линейным векторным разностным уравнением 0...=Fa-hA+G.> /: = 0,1,2,..., (15.15) где Ft+i 4 - переходная матрица состояния размера vxv; Gk - матрица размера vxm; - /и-мерный вектор гауссовских величин, для которого M;t=0, M{E,k}=Qi,k; Qk - матрица размера тхт; 5д - символ Кроне-кера; ©о задает начальное состояние. Уравнение (15.15) характеризует движение ЛА, матрица F+it задает динамику движения, а матрица Gt определяет преобразования возмущений, воздействующих на ЛА. Наблюдаемый векторный процесс имеет вид ш=Сш®ш+<м, к=0,1,г..., где Ск+1 - матрица размера mxv; k+i ~ m-мерный вектор погрешностей измерений (шум). Процесс последовательного формирования оценки вектора состояния описывается соотношением ®их = иик®к + B,. (R,. -C,,F 0,), к = 0,1,2,..., (15.16) Например, если нужно оценить параметры прямолинейной траектории, то при равномерных и равноточных измерениях и мерности задачи, равной двум, получим , G;t-0, к+\.к~ ,С;н. 1 О .K. = ciM. (15.17) Совместное решение алгоритмов (15.16) и (15.17) позволяет найти соотношение
Ч обз (15.18) Алгоритму (15.18) соответствует структура фильтра Калмана (см. рис. 9.16). Работа такого фильтра рассмотрена в гл. 9. Фильтр Калмана является линейным рекуррентным фильтром, что позволяет последовательно сглаживать параметры траекторий. Однако при реализации таких фильтров по мере вычисления коэффициентов Вклл их величина уменьшается и стремится к нулю, поэтому они перестают зависеть от входных данных, что делает невозможным обнаружение маневров цели. Кроме того, при больших к коэффициенты Вк / соизмеримы с величиной вычислительных ошибок из-за многократного обращения матриц. В результате фильтры становятся неустойчивыми. Имеются приемы, препятствующие неустойчивости фильтра, например регуляризация, которая сводится к добавлению в фильтр шумов. 15.4. Стробирование отметок целей При вторичной обработке радиолокационной информации отметки целей должны быть выделены (селектированы) с помощью стробов (стробирования), при этом отклонения отметок от центра строба не должны превышать некоторой фиксированной величины
|