
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание (15.19) где Uomi={Ri,a i} - совокупность координат /-й отметки; cipi={cTi)/,acTpi,PcTi)i} - совокупность координат центра строба для /-й траектории; АС/ст ;={А/?ст.р/, Аастр АРстр} - размеры строба по координатам /?,а,Р для /-Й траектории. Качество стробирования зависит от формы и размеров стробов и оценивается на основе статистических характеристик отклонения истинных (принадлежащих сопровождаемой траектории) отметок от экстраполированных точек. Отклонение истинной отметки от центра строба определяется суммарными случайными и динамическими ошибками экстраполяции координат траектории по предыдущим значениям ее параметров и ошибками измерения координат новой отметки. Рассмотрим статистические характеристики этих ошибок, применительно к обзорной РЛС. Пусть по данным предыдущих (п - I) обзоров произведена экстраполяция координат траектории цели на следующий -й обзор. Положение экстраполированной точки обозначим О (рис. 15.3). В этой точке поместим начало декартовой системы координат и направим ось Y по направлению РЛС - цель, ось Л- перпендикулярно этому направлению в плоскости вращения антенны, а ось Z - так, чтобы образовалась правая система координат. Суммарные отклонения новой отметки от экстраполированной точки в выбранной системе координат будем обозначать Ахл, Avi, Azz. Величины этих отклонений равновероятны (при условии отсутствия систематических ошибок измерения): Axj. = Ах +Лх , Ау = Av +Ау Az= Az +Az (15.20) дстр -VL - -ел .дстр -i. -СЛ -дстр При выбранных направлениях осей координат случайные составляющие АХ ±ДАР,+АР ), 4с ±(Асф+АХ (15.21) Аг ±ДА1,+Ла ), 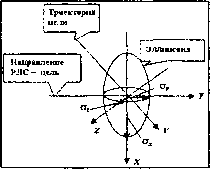 где А/? , Aa , Ар - ошибки измерения. Эти составляющие статистически независимы и подчинены нормальному закону распределения вероятности с нулевым математическим ожиданием и ДИСПер- ,53 эллипсоид суммарных ошибок сиями о,о и сг соответственно, системы вторичной обработки Плотность вероятности трех независимых случайных величин Поверхность одинаковой плотности вероятности дает уравнение эллипсоида в пространстве (см. гл. 5): (Дх ) , (Av ) (Az,J , Будем далее считать, что составляющие динамических ошибок экстраполяции также подчинены нормальному закону распределения вероятности и независимы по осям. В трехмерном пространстве динамические ошибки тоже образуют эллипсоид вероятностей. Эллипсоиды случайных и динамических ошибок складываются и образуют в пространстве суммарный эллипсоид (см. гл. 5): W(A,A A,)=-J-ехр. (15.22) где X = Таким образом, поверхность равновероятного отклонения истинных отметок от центра строба представляет собой эллипсоид, величина и ориентация сопряженных полуосей которого относительно направления РЛС - цель зависит от ошибок измерения, интенсивности маневра и направления вектора движения цели. При эллипсоидальном распределении отклонений истинных отметок от центра строба очевидно, что строб должен иметь форму эллипсоида с увеличенными в iV раз полуосями, где N - коэффициент увеличения размеров строба для обеспечения попадания отметок в строб. Вероятность попадания случайной точки в эллипсоид определяется из выражения Р(Х) = 2 Фо(Х.)-4=Х.ехр /27r (15.23) где Фо(Х)= у/2п dt;X= N. При А, > 3,5 вероятность Р(Х) близка к единице. Такие значения X нужно выдержать при выборе размеров строба. Формирование эллипсоидальных стробов практически невозможно ни при математическом, ни при физическом стробировании. Поэтому формируют строб в виде усеченного пространственного сектора (объ- 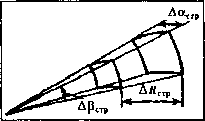 емкого элемента разрешения), близкого по форме к параллелепипеду, в который вписывается эллипсоид суммарных ошибок (см. рис. 15.1). Размеры сторон параллелепипеда равны соответственно 2A,a., IXg и 2А,а;, а его объем определяется по формуле 8А,ада,а;. То что объем строба стал больше объема эллипсоида ошибок приводит к увеличению вероятности попадания в строб ложных отметок и, следовательно, к ухудшению селектирующей и разрешающей способности стробирования. Практически форма строба выбирается простейшей в той системе координат, в которой осуществляется обработка информации. Для случая обработки в сферической системе координат простейший строб задается линейным размером по дальности Д/?стр и двумя угловыми размерами: по азимуту Дастр и по углу места ДРс1р (рис. 15.4), т.е. по форме он совпадает с элементом разрешения. Эти размеры могут быть установлены заранее с учетом максимальных значений случайных и динамических ошибок обрабатываемых траекторий. Как указывалось, при пропуске одной или даже нескольких отметок от цели система сопровождения продолжает траекторию по имеющимся данным путем экстраполяции ее КООр- Рис. 15.4. Форма пространственного строба динат. Ошибки экстраполяции при этом возрастают, что приводит к увеличению размеров строба. Обычно эти размеры рассчитываются заранее на случай пропуска определенного количества отметок при отсутствии и наличии маневра цели. Приведенные соображения по выбору размеров трехмерного строба относятся и к случаю двухмерного стробирования на плоскости, применяющегося в двухкоординатных РЛС (форма строба показана на рис. 15.1), а также в трех координатных РЛС с парциальными каналами по углу места. В стробы могут попадать ложные отметки, образованные выбросами шума и помех после предварительной фильтрации, поэтому приходится использовать логику анализа ситуации. Например: 1. Продолжать экстраполировать траекторию по каждой отметке в стробе. Через несколько обзоров ложные траектории будут сброшены с сопровождения, а истинные будут сопровождаться. 2. Отбирать отметки по их отклонениям от центра строба, используя критерий максимального правдоподобия, и оставить на сопровождении одну отметку, имеющую наибольшую вероятность того, что она принадлежит к сопровождаемой траектории, т.е. для нее
|