
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание фильтрации, статистическую теорию обнаружения и оценивания, теорию радиолокационного сигнала вместе с функцией и диаграммой неопределенности и, наконец, теорию и технику селекции движущихся целей. Эта теоретическая база послужила толчком к быстрому развитию радиолокационных устройств и систем следующего поколения. Упомянутые теоретические работы остаются актуальными до настоящего времени, являясь классическими. В дальнейщем начали применяться фазированные антенные рещет-ки, что позволило осуществлять гибкий просмотр пространства с электронным управлением ДНА с помощью ЭВМ. Очередную техническую революцию произвело появление цифровой элементной базы, которое стимулировало быстрое развитие теории и техники цифровой обработки радиолокационной информации. Появление транзисторов, интегральных схем, а затем больших и сверхбольших интегральных схем, разработка методов микроминиатюризации аппаратуры, пленочной и гибридной технологии, а также твердотельных элементов СВЧ, в том числе полоско-вых, привели к созданию совершенных бортовых радиолокаторов. В настоящее время бортовые РЛС успешно используются на самолетах и вертолетах, на морских и речных судах, на космических кораблях и т.п. Наиболее интересное применение РЛ-систем в мирных целях -дистанционное зондирование поверхности Земли в интересах экологического мониторинга, геодезии и картографии или геологии с летательных и космических аппаратов. При этом щироко используется техника синтезирования апертуры антенн для получения линейного разрешения в несколько метров. Строители и геологи успешно эксплуатируют так называемые георадары для подповерхностного зондирования с целью обнаружения подземных пластов воды и нефти, электрокабелей и трубопроводов (рис. 3.1). Широко применяются РЛС для управления воздушным движением (РЛС УВД) самолетов и вертолетов как на трассах полета, так и зоне аэропортов (см. рис. 3.2). Похожие по облику и построению РЛС используют для противовоздушной (РЛС ПВО) и противоракетной (РЛС ПРО) обороны. На рис. 3.2 показана фотография американской РЛС ПРО Пейв Поуз с ФАР для дальнего обнаружения боеголовок баллистических ракет, работающая в УВЧ-диапазоне радиоволн.  Рис. 3.1. Георадар для подповерхностного зондирования Рнс. 3.2. РЛС Пейв-Поуз , предназначенная для дш1ьнего обнаружения головных частей баллистических ракет Рнс. 3.3. Дальний радиолокационный самолетный комплекс обнаружения А-50 В гл. 2 рассмотрены ограничения дальности обнаружения целей, в том числе и кривизной Земли. Увеличение дальности прямой видимости, особенно низколетящих целей, возможно при подъеме РЛС на значительную высоту (до 10 км), для чего разработаны и используются так называемые дальние радиолокационные комплексы обнаружения (ДРЛК). На рис. 3.3 показан российский комплекс дальнего радиолокационного обнаружения, аналогичный американскому комплексу AWACS. В настоящее время системы ПВО оснащаются зенитно-ракетными комплексами (ЗРК), которые имеют в своем составе как радиолокатор обнаружения, так и радиолокатор наведения (рис. 3.4, 3.5).   Рис. 3.4. РЛС обнаружения ЗРК Бук Рис. 3.5. Радиолокатор наведения зенитных ракет и пусковая установка ЗРК Бук Для целей геодезии, картографии и экологического мониторинга широко применяются спутниковые и самолетные радиолокационные системы обзора земной поверхности (рис. 3.6). Большие усилия были затрачены при разработке и создании радиолокаторов де-Рнс. 3.6. Детенный блок РЛС обзо- каметрового диапазона для сверхдальнего ра земной поверхности рас- обнаружения морских И воздушных целей положенной в носовой части фюзе- ляжа самолета Ил-76 снизу под об- С использованием многократного скачко-текателем (см. рис. 3.3) образного отражения сигнала от ионосфе-  ры и Земли. Снимок одной из РЛС загоризонтного обнаружения (американская ЗГ РЛС AN/FPS-118) показан на рис. 3.7.  Рис. 3.7. РЛС для загоризонтного обнаружения объектов Рис. 3.8. ТУ-134 с РЛС С А ИМАРК (а) и аппаратура РЛС СА (б) Поскольку экологический анализ возможен только при высоком разрешении деталей изображения земной поверхности, при получении таких изображений пользуются техникой синтезирования апертуры (рис. 3.8). На рис. 3.9 приведен кадр земной поверхности, полученный с помощью РЛС с синтезированной vt.4Jxм%Flf, -~-- -чип апертурой. Подводя итог краткому очерку истории развития радиолокации и радиолокацион-ных систем, отметим, что в наши дни нет ни одной отрасли науки, техники и технологии, в которую РЛС не внесли бы существенный вклад. Высокие технологии в биологии и медицине, управлении и распознавании в оборонной и мирной 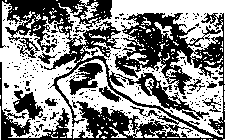 Рнс. 3.9. Изображение гористой местности, полученное методом синтезирования апертуры технике, геодезии и картографии, астрономии и космической технике, аэрокосмической технике и метеорологии невозможны без радиолокационных систем. Двадцатый век был веком возникновения радиолокации - двадцать первый век должен стать веком широкого применения радиолокационных систем!
|