
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание uit) 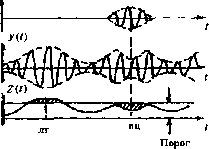 Видно, что при обнаружении сигнала путем сравнения ДО с порогом в РУ возможны две ошибки. Ошибка первого рода - происходит ложное обнаружение шумового выброса n(t)=> ложная тревога (ЛТ). Ошибка второго рода - за счет подавления шумом сигнал м(/) не обнаруживается => пропуск 1{ели (ПЦ). Очевидно выбор оптимального правила (критерия) обнаружения связан с проблемой минимизации вероятностей (интенсивности или уровня) ошибок первого и второго рода. Пусть процесс y{t)=u{t,Q) + +n{t) протекает в непрерывном Рис. 3.2. Ошибки при обнаружении сигнала: у=у( дискретном У=у{0=у> Z(t) - огибйющая смеси сигнала с шумом на / i -j /д .ч входе Py;j</)-смесь сигнала и шума на выхо- времени ( - 1,2,3,..., / аблДО-де УПЧ; иЦ) - сигнал на выходе УПЧ; л(0 - Пространство входных реализа-шум на выходе УПЧ ций обозначим Г, а пространство параметра Q обозначим Q. Распределение вероятностей у =Х0 зависит от 9, значение которого неизвестно. Последовательность величин y{ti) имеет и-мерную плотность распределения вероятностей w{y/Q) при заданном значении.0. Введем множество решений Д с элементами d, и пространство решающих правил Л с решениями 5. Таким образом, решающее правило 6(у) = d отображает пространство реализаций Г в пространство решений Д. При принятии решений возможны и неизбежны ошибки, приводящие к потерям, для учета которых вводится функция потерь или штрафов C{Q,d), определяющая величину потерь С при принятии решения d в случае истинности ситуации 9. С помощью C{Q,d) можно оценивать качество выбранных правил решений, но с учетом специфичности этой функции. Наиболее часто для этого используют математическое ожидание функции потерь при известном 0 - так называемую фунтию риска (условный риск): (3.1) гф,б) = М {С{<д,3{у)) 16} = \C(Q,d{y))w{y I Q)dy. Однако использование гф,Ъ) для выбора оптимального 5 затруднительно, поскольку его нужно знать для всех 9, а функция С(9,5) сама зависит от 9. При байесовом подходе 9 считают величиной случайной с априорной плотностью распределения вероятностей но(9), которая известна. Тогда можно вычислить средний риск: 7{wiQ%S)=MM{C(e,S(y)/Q} = [г(е,)с/и<е) . (3.2) Байесово решение S* минимизирует 7. Оптимальное правило решений разбивает область Г на две области Г и Го, в которых справедливы альтернативные гипотезы Hi и Яо о наличии или отсутствии By(t) сигнала u(t). Условная вероятность ошибки первого рода (ложной тревоги) F=P{cllН) = Р{уе Г,/0}= [w{yl{i)dy. Условная вероятность правильного необнаружения F=\-F=P{dlH,}=P{y&V,l, при этом условная вероятность ошибки второго рода (пропуска цели) D=P{dlН) = Р{у& Го/е}= \w{ylQ)dy. Условная вероятность правильного обнаружения D=\-D = P{dJН}Р{у& Г,/9}. Здесь D - мощность правила решений; F - уровень значимости правила решений. Что касается априорных вероятностей состояний w о, то, например, при простом обнаружении Wo(0) + > o()= I или р(0) +/?(!)=!. Если обозначить р(\)= р,г р(0) = q,TO р + q = 1. 3.2.Критерии оптимального обнаружения Критерий Байеса. Пусть 9 =1 соответствует наличию сигнала в y(t), а 9 = О - его отсутствию. Множество решений de Д вырождается в два: с/->9 = 1 и do~->Q = 0. При простом бинарном обнаружении 9 , и функция потерь переходит в квадратную матрицу 00 - Ol 10 -11 Можно положить Соо = C(0,do) = С i = С( 1 ,di) = О (потерь нет), и Со, = С\ОА) > О, С,о = С( I Л) > 0. Задача обнаружения эквивалентна проверке гипотезы Н\ о том, что 9 = 1, при альтернативной гипотезе Hq о том, что 9 = 0. По результатам наблюдения je Г нужно выбрать одно из двух решений: d\ или Jq- Класс решений Ае 5 состоит из правил разбиения области Г на две подобласти: Г и Го. Отыскание байесова решения сводится к выбору подобластей таким образом, чтобы средний риск был минимален: 50)= da при у& Го, 8(у)= di при>е Г. В случае простого обнаружения (9i=l,9o=0) средний риск где rQ=CooP{d(i/Ho}+CoiP{di/HQ}=CQo(l-F)+CoiF - условный риск при 9=0; г,=С,оР{о/Я,}+С Р{£/,/Я,}=С,о(1-£>)+С 0 - условный риск при 9=1; р - априорная вероятность присутствия сигнала ву\ q- априорная вероятность отсутствия сигнала ъу; D - вероятность правильного обнаружения; F- вероятность ложной тревоги. Тогда средний риск г = Соо + рС.о + 9(Со, - Coo)F = р(С,о - С, ,)D = qC + рС.о + + J[ р(С,о - С )wiy /1) - (Со, - Coo)iv( V/ 0)] ф. Поскольку qCQQ+pC\Q - постоянная положительная величина, минимум 7 будет получен при p(C,o-C )wO/l) > (Co,-Coo)wO/0) qwylQi) C,o-C Величина w{y/\)lwiy/\y=K(y) называется отношением правдоподо- бия, а - ~-22-=Гявляется порогом решения. Р Qo ~ 11 Таким образом, алгоритм обнаружения состоит в следующем: если Л>Г, то принимается решение b{y)=d\, справедлива гипотеза И\, у принадлежит области Г а если Л<Г, то принимается решение 5(у)= da, справедлива гипотеза Иа,у принадлежит области Го, как это показано на рис. 3.3, при этом область Г разделена границей Т на две области Г и Го.
|