
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание синхронизатора, аналогового процессора (приемника), цифрового процессора и устройства отображения информации. Антенна по сигналам от ЭЦВМ осуществляет формирование лучей и их перемещение для обзора пространства. Радиопередатчик формирует зондирующие сигналы, которые излучаются антенной. Радиоприемник усиливает слабые отраженные целью и принятые антенной сигналы. Поскольку эти сигналы приходят в смеси с шумами и помехами, то их выделение осуществляется с помощью согласованных фильтров сосредоточенной селекции и цифровых фильтров. Обычно процессор сигналов (приемник) выдает электрические сигналы в цифровом коде. Дальнейшая обработка сигналов выполняется в процессоре данных по заложенным в него программам алгоритмов обработки. Рабочие частоты и временные интервалы в РЛС задаются с помощью синтезатора-синхронизатора. Устройство отображения информации выполняется обычно на индикаторе с электроннолучевой трубкой или на дисплее процессора. Количество одновременно обнаруживаемых и сопровождаемых целей определяется быстродействием систем обработки информации - выходного устройства, в качестве которого обычно используется цифровой процессор. На рис. 1.3 изображен диспетчерский пункт регулирования воздушного движения в зоне аэропорта. Типичное изображение на ЭКра- Рис. 1.3. Диспетчерский ПУ...сг УВД не индикатора кругового обзора (ИКО) РЛС УВД показано на рис. 1.4, а. Здесь можно различить светящиеся радиальные и круговые метки. В центре экрана находится РЛС. Яркие точки - отметки целей. По радиусу можно отсчитать дальность, а по углу поворота радиуса, проходящего через отметку цели, относительно вертикали, проходящей через центр экрана, можно измерить пеленг цели. К каждой отметке на экране прикреплен формуляр, который содержит необходимую информацию о бортовом номере, высоте, дальности и азимуте самолета (рис. 1.4, б). На рис. 1.4 для лучшей различимости проведено инвертирование изображения.  .in. 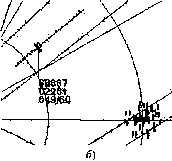 Piic. 1.4. Вид экрана РЛС управления воздушным движением: а - общий вид экрана; б-укрупненное изображение фрагмента экрана с формуляром 1.3. Физические основы радиолокационных измерений Информативный параметр сигнала. Информация о геометрических элементах W, характеризующих положение и элементы движения объекта (цели), содержится в параметрах радиосигнала. Такой параметр называется информативным. В общем случае электромагнитное поле в точке приема является одновременно функцией времени и координат пространства. Поэтому информативными параметрами у радиолокационного сигнала могут быть время прихода, частота, начальная фаза, амплитуда, а также направление прихода сигнала (два угла в пространстве) и параметры поляризации поля. Поиск сигнала производится по его информативному параметру. При этом приходится либо поочередно просматривать все значения этого параметра, либо одновременно наблюдать их. Устройства поиска, основанные на первом методе (устройства последовательного поиска), более просты в реализации, но требуют времени на просмотр всех возможных значений параметра. Устройства, основанные на втором методе (устройства параллельного поиска), способны обнаруживать сигнал за существенно меньшее время, однако оказываются технически более сложными. Следует отметить, что обнаружение сигнала по информативному параметру при поиске эквивалентно фубой оценке (измерению) этого параметра, а следовательно, и элемента W. Эта информация используется при последующем точном измерении (уточнении) W. Реальная среда не является однородной и обладает определенным коэффициентом преломления п. В такой среде скорость распространения радиоволн V = с/п, где с - скорость радиоволн в вакууме (скорость света), равная 299792458,211,1 м/с. Неоднородность среды, в которой распространяются радиоволны, приводит к тому, что скорость их распространения в реальных условиях не остается постоянной, а траекто- рия радиоволн не совпадает с кратчайшим расстоянием (прямой) между точками излучения и приема колебаний. Поэтому в точных РЛУ необходим учет влияния среды распространения на точность определения элемента fV. В приближенных расчетах влиянием п часто пренебрегают и считают V = с = 3 I О* м/с. Дальность до цели в РЛС измеряют по времени запаздывания принятого сигнала относительно известного времени его излучения. Например, в РЛС время запаздывания отраженного сигнала относительно излучаемого (зондирующего сигнала) ti{=2R/c, где R - дальность до цели; с - скорость распространения радиоволн. Скорость объекта обычно определяют по доплеровскому сдвигу несущей частоты сигнала fo. В радиолокационных измерителях радиальной скорости, например, доплеровский сдвиг частоты связан с радиальной скоростью движения объекта соотношением /о = - где Xq - длина волны излучаемого сигнала; - радиальная скорость относительного движения цели. Угловые координаты можно измерять, используя направленные свойства антенны. Например, при обзоре пространства узким лучом антенны угловое положение объекта относительно направления, принятого за опорное, можно определить в момент достижения амплитудой принятого сигнала максимума. Используют и другие методы определения угловых координат. Одной из основных задач при обнаружении сигналов и измерении их информативных параметров является разрешение сигналов, осуществляемое РЛУ, способным обнаруживать и раздельно измерять мало отличающиеся информативные параметры, соответствующие мало отличающимся элементам W, характеризующим положение и параметры движения объектов (целей). В радиолокации обычно говорят о разрешении целей, незначительно отличающихся по дальности, угловым координатам или скорости. Способность РЛУ разрешать сигналы (цели) определяется типом используемого сигнала, шириной диаграммы направленности антенны, а также способом обработки сигнала и видом принятого в системе представления информации об объекте (цели). В некоторых случаях по принятому сигналу требуется решить задачу распознавания объекта (цели). В радиолокации применяют анализ тонкой структуры принятого сигнала или анализ спектра отраженного сигнала, и тот и другой зависят от конфигурации и размеров отражающего объекта.
|