
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание Обнаружение произвольного сигнала на фоне произвольной помехи с независимыми значениями. Входная реализация y(ti=u(tk)+itic) = =Quk+E,k. Плотность распределения вероятности помехи с независимыми значениями д- обозначим Wk(jE,), где /c=\,2,3,...,N- номер периода повторения. Отношение правдоподобия имеет вид \=-- (3.21) 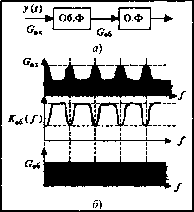 Рис. 3.22. Структура обнарткителя радиосигналов на фоне коррелированной помехи (а) и спектральная картина обеления помехи (б) In л = Z = [п[\Щ = X[ln w(y, - ,) - In wiy,)]. Разложим hmk- щ) в ряд по степеням щ Ы1 Ук (3.22) тогда Z= 2] In w.(y,). <Ук Объединив в (3.22) часть сомножителей в функцию /,(ук)= (-1) d - In iv (>;.), получим /! dy, (3.23) гдeZ,=5]y;(>,) l. Алгоритм показывает, что обнаружитель - многоканальное устройство с бесконечным числом каналов (рис. 3.22,а) ,в каждом из которых стоит блок нелинейной обработки (БНО), осуществляющий нелинейное преобразование Ду). Число каналов стараются уменьшить, что можно сделать с некоторыми потерями, если отношение сигнала к по- -J ПУ
обф гяус. прм мехе невелико. Для этого в (3.23) уменьшают число членов ряда. Так, в пределе при N= 1 rjxeF(yk) = -\nw.{yk), 06-dy наружитель становится одно-канальным (рис. 3.23,6). При Wjt->0 Zi- Z и обнаружитель является асимптотически оптимальным. В частном случае, если помеха гауссовская: -Му) = = - In dy ехр<- то обнаружитель становится оптимальным с коррелятором или оптимальным фильтром на вхо-Рис. 3.23. Обнаружитель произвольного сигнала д£ поскольку /]{уУу/о - ЛИ-на фоне произвольной помехи, с независимыми операция (рИС. 3.23,в). значениями Если рассматривать более сложный случай, когда помеха коррелированная, то структура обработки усложнится и на вход нужно добавить обеляющий фильтр (рис. 3.23,г). Цифровое обнаружение. Цифровые обнаружители обрабатывают информацию, полученную с помощью аналого-цифрового преобразователя (АЦП) обычно с выхода детектора, в дискретизированную во времени и кодированную по уровню. Таким образом, Y =Ui преобразуется в сигналы 5, (рис. 3.24,а). В простейшем случае при бинарном квантовании сигналов 5/=1 при К >Лкв, 8,=0 при Y,<h, тогда А=-7-:--. P(KKh.....бд,/в=о) На выходе АЦП заданы условные плотности распределения вероятностей w(Uk/Q)= w(Y ,iJQ). Вычислим вероятность появления единицы на к-й позиции при наличии только шума: Р пи w(U,/Q = 0)dU,. Такая же вероятность при наличии сигнала: 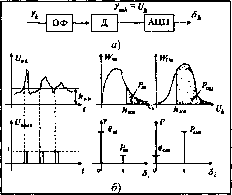 Р = сш/ w(U /Q = \)dU работы цифрового обна- ~ * ружителя: а - схема; б ~ кват-ование; в - вероят-ности превышения порога шумом /? и сигналом с шумомузсш где 1-г шГЧшЬ сш/~ Чсш1 ~ вероятности появления нуля на /-й позиции. Условные вероятности принятия случайной величиной 5* любого из двух возможных значений (0,1), показанных на рис. 3.24, б, р{8,/е = 0} = Piql;;f, р{б,/е = i} = p,q. При статистически независимых наблюдениях p(5 62,...,6;,/0=o)=fjpii:,, Р{Ъ Ъ2,...,Ъ1 = \) = \1рЫ~ поэтому А = Y\ сш( . р . 1пЛ = 2] 1=1 L (3.24) где Ж/ - весовой коэффициент: = In Этот алгоритм соответствует структуре весового накопителя (интегратора). Если шум стационарный: Рии = Р, а пачка импульсов имеет
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||