
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание ч111малча-чэ-т-Ш1 При параметрической априорной неопределенности часто неизвестными или меняющимися параметрами могут быть: интенсивность (мощность) помехи а], доплеровская поправка частоты содп или набег фазы за период повторения сОдпГп для пассивной помехи, широкополос-ность помехи а,а (а,омТп) или ее коррелированность Ткп- Неопределенность и изменение а, в элементе разрешения, а также от элемента к элементу разрешения в пределах зоны обзора может сильно снизить эффективность устройств обнаружения, что обусловлено большим динамическим диапазоном (до 90 дБ) изменения мощности помех. При недостаточном подавлении помехи ее остатки могут менять уровень и частоту ложных тревог. Мерой борьбы с этим недостатком является использование устройств обнаружения с изменением порога обнаружения в соответствии с интенсивностью помех в элементах разрешения. На рис. 3.30 показана структура обнаружителя с постоянным уровнем ложных тревог (ПУЛТ). В схеме рис. 3.30 текущие реализации , пропорциональные мощности помех (X, Ul,j), формируются с помощью квадратичного детектора (КвД). Эти реализации подаются на линию задержки с N+\ отводами через т . Со среднего отвода линии выборочное значение X, подают на нормирующее устройство (Н), где производится деление Х, на средний по числу ячеек или числу элементов дальности уровень мощности помехи PrKp=W. Средняя мощность помехи формируется путем усреднения вы- борочных значений vY) со всех отводов линии, кроме среднего: W=- Х,. На выходе устройства нормировки образуется Z=X/W, что и обеспечивает при обнаружении постоянство уровня ложных тревог. Удобно использовать устройство Рис. 3.30. Обнаружитель ПУЛТ ЛОГАРИФНИЧЕСКИЙг( i 1 детектор Рис. 3.31. Логарифмическое устройство ПУЛТ нормировки С логарифмической схемой ПУЛТ (рис. 3.31). Здесь вместо квадратичного детектора используют комбинацию УПЧ с логарифмической амплитудной характеристикой (ЛУПЧ) и де- тектора огибающей (ДО) (линейного детектора). Эта комбинация называется логарифмическим детектором, на выходе которого реализуется Yj. Поскольку \x\Xi=2\nU, то Y, X и операцию нормировки можно осу- ществлять не делением >\7Ж, а вычитанием Y-V, гдеС/=-. Вели- чину Z, нормированную к уровню помех, получают после обратного экспоненциального преобразования. Основой решения проблемы незнания законов распределения вероятностей сигнала и помехи является использование инвариантных либо адаптивных алгоритмов обнаружения радиосигналов. Кроме того, методы и алгоритмы обнаружения подразделяют Hdi устойчивые и роба-стные. Характеристики устойчивых алгоритмов независимы от законов распределения вероятностей сигнала и помехи. Робастные алгоритмы более просты, но их характеристики, хоть и слабо, но зависят от законов распределения. Инвариантные обнаружители при воздействии стационарной помехи и выборке конечной мерности дают возможность перехода к новой статистике, не зависящей от выборочных значений. Наиболее часто используются: знаковая статистика, статистика ступенек и ранговая статистика. При знаковой статистике переходят от выборочных значений Y, к их знаку: SignK,Hi +1 -1 при Y > О, при } < 0. Процесс перехода к знаковой статистике показан на рис. Ъ.Ъ2,а, где видна замена выборочных значений стандартными положительными (+1) и отрицательными (-1) импульсами. Видно, что статистика знаков не зависит от выборочных значений. На рис. 3.32,6 показана одна из возможных схем построения знакового обнаружителя. Реализации Yi с широкополосного ограничителя (Ш Огр) поступают на вход линии задержки, с отводов которой выборочные значе- Р статистике знаков (а) и знаковый обнару- житель (б) ния складываются, детектируются и сравниваются с t/nop- Данное устройство реализует так называемый простой знаковый алгоритм: 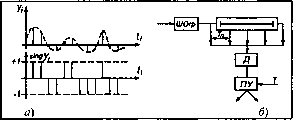 Процедура обнаружения сводится к накоплению знаков или стандартных импульсов, или, наконец, ограниченных импульсов в пределах длительности входной выборки и сравнению затем результатов накопления с порогом. Корреляционному знаковому обнаружителю, который использует корреляцию знаков, соответствует так называемый линейный знаковый алгоритм: Z=t/,sign} Т. Структура этого обнаружителя представлена на рис. 3.33,t/. Входная выборка У; с помощью ШОгр переходит в s\gr\Y, и затем умножается на опорный сигнал С/,. Результат перемножения накапливается в накопителе после чего проверяется на порог. Возможно применение алгоритма двойной знаковой статистики, когда опорный сигнал и, переводят в форму знаков (signC/,): Z=signC/,signy) *Т. Схема такого обнаружителя показана на рис. 3.33,6. При использовании статистики ступенек переходят от У, к ступенькам, которые формируются следующим образом: Г+1->при К>0, [0->при >;<0. Процесс перехода к ступенькам показан на рис.3.34,а. Как видно ступеньки S{Y) связаны со знаком выборочных значений sign У: 5(}0=l/2(signy+l), а стати-Рнс. 3.33. Знаковые обнаружкгели: а ~ про- стика не зависит от выборочных стой, б - с двойной знаковой статистикой значений У. Алгоритм обнаружения задается соотношением
На рис. 3.34,6 после ШОгр осуществляется суммирование сигналов с отводов линии задержки, отстоящих один от другого на величину т . Результат детектируется и сравнивается с порогом T-N/2.
|