
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание 1.4. Методы определения координат в РЛС Системы координат. Местоположение объекта (цели) характеризуется положением центра объекта (центра масс цели) в некоторой опорной системе координат. При радиолокационном определении местоположения наиболее часто применяют местную сферическую систему координат, начало которой находится в точке размещения антенны РЛС. В наземной РЛС одна из осей координатной системы совпадает с северным направлением меридиана, проходящего через позицию антенны РЛС, поэтому местоположение цели (Ц) находится по результатам измерения наклонной дальности R, азимута а и угла места р (рис. 1.5, а). При этом система координат неподвижна относительно земной поверхности. Если РЛС располагается на летательном аппарате (ЛА) и ось X координатной системы совмещается с продольной осью ЛА, а ось Z - с направлением правого крыла (рис. 1.5, б), то для определения местоположения цели измеряют наклонную дальность R, курсовой угол - азимут цели а и угол места р. Такая связанная с ЛА система координат перемещается относительно земной поверхности со скоростью, равной скорости полета ЛА, и поворачивается относительно Зем- 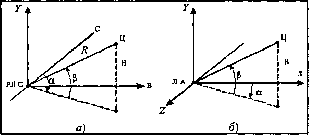 Рис. 1.5. Местные сферические системы координат а - РЛС на поверхности Земли; б - РЛС на борту ЛА ли при его эволюциях. При определении местоположения применяют как местную сферическую систему координат (рис. 1.5, а), так и глобальные системы. Местные системы координат используют при дальностях R, не превышающих несколько сотен километров (в зоне прямой видимости), а глобальные - при большой дальности. В глобальной, например, геоцентрической системе координат, местоположение объекта определяется в координатах: широты фг, представляющей собой угол между плоскостью экватора и направлением от объекта к центру Земли(различают северную и южную широты) и долготы Хг, представляющей собой угол между плоскостями Гринвичского меридиана и местного меридиана, проходящего через проекцию объекта на земную поверхность. Методы определения местоположения объектов. В радиолокации для определения местоположения цели (объекта) чаще всего применяют позиционный метод, основанный на использовании поверхно- стей или линий положения для определения места объекта в пространстве или на поверхности Земли. Поверхность положения представляет собой геометрическое место точек в пространстве, отвечающих условию постоянства параметра Ж (дальности, угла и т.п.). Местоположение ЛА в пространстве находится как точка пересечения трех поверхностей положения (ПП). Пересечение двух поверхностей положения, соответствующих элементам Wi и дает линию положения (ЛП), которая является геометрическим местом точек с постоянными значениями элементов Wi и 3. На плоскости достаточно
двух линий положения со Рис. 1.6. Поверхности положения при определении значениями элементов Wi и местоположения объекта М позиционным (дально-W2, которые измеряются мерно-пеленгационным) методом двумя РЛУ. На рис. 1.6 показано определение места ОЛ, находящегося в точке М пространства, дальномерно-пеленгащюнньгм методом. 1.5. Та1аико-технические параметры РЛС Тактические и технические параметры представляют собой совокупность величин, характеризующих качество РЛС. Тактические параметры определяют значение и возможности системы, основными из которых являются: область обзора (рабочая область), разрешающая способность, точность, помехоустойчивость, пропускная способность, надежность и эксплуатационная эффективность. Область обзора - область пространства, в пределах которой цель с определенными отражающими свойствами может быть обнаружена с вероятностью правильного обнаружения и ложной тревоги не хуже заданных. Этот важнейший параметр РЛС характеризуется пределами обнаружения по дальности, азимуту и углу места, т.е. максимальной и минимальной дальностями обнаружения и секторами обзора по азимуту и углу места (иногда эту область называют областью обнаружения). Вместо области обзора может использоваться рабочая область, т.е. область пространства, в пределах которой погрешность ап нахождения местоположения с помощью РЛС с известной вероятностью, не превышает заданную сг,. На плоскости понятию рабочая область соответствует рабочая зона. Рабочая область характеризуется дальностью действия 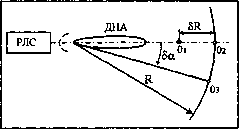 Рис. 1.7. Разрешение целей по дальности и азимуту системы /?, ах, т.е. максимальным удалением от РЛС, на котором обеспечивается заданная точность определения координат объекта (цели). Разреишющая способность оценивает возможность раздельного определения координат близко расположенных объектов (целей). Мерой разрешающей способности по дальности является минимальное расстояние ЪК между двумя объектами OiH От с одинаковыми угловыми координатами а, р, при котором возможны раздельное обнаружение и измерение дальности этих объектов (рис. 1.7). За меру разрешающей способности по угловой координате принимают минимальную разность угловых положений 5а (8Р) объектов От и Оз с одинаковыми R, а (R, Р), при которой возможны раздельное обнаружение и определение угловых координат этих целей. Разрешающая способность по скорости 5F - минимальная разность скоростей объектов с одинаковыми /?, а, р, при которой возможно раздельное обнаружение и измерение скорости этих объектов. Увеличение разрешающей способности, т.е. уменьшение 5/?, 5а и т.д., достигается соответствующим выбором сигнала и параметров антенной системы. Точность отражает близость результатов измерения к истинному значению измеряемой величины и характеризуется значениями систематических и случайных погрешностей. Систематические погрешности обусловлены закономерными факторами, поэтому их можно оценить расчетным путем или экспериментально и, следовательно, либо устранить, либо учесть при измерениях. Обычно под результатом измерения понимают величину, свободную от систематической погрешности. Случайные погрешности вызываются большим числом факторов, не поддающихся точному учету и действующих в каждом отдельном измерении различным образом, поэтому обычно считают, что случайные погрешности измерений д: распределены по гауссовскому (нормальному) закону (рис. 1.8): -ехр где ст - дисперсия случайной величины х. За меру точности принимают среднюю квадратическую ст, срединную (вероятную) 5 или максимальную дгах погрешность.
|