
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание = о/ф)71 + +2/Ссо5(ф ,+Ф, ) . Если используются сигналы с горизонтальной линейной поляризацией, то К~ I, а фотр = тс, поэтому лф)- = /i(P) = /ф)72(1-со5фр,) = 2/(P)sin ч 2 , Г2я- = 2/(P)sin -/?sinP Г 2л При обнаружении целей на малых высотах А, sin - sinp V у /?sinp, поэтому дальность обнаружения будет определяться соот- ношением /г, з, = /?. axo/l(P)= /?.пахО Следовательно, 4rrh R =8 max Сферичность Земли ограничивает дальность действия РЛС, в которой используются радиоволны с длиной менее 10 м, распространяющиеся над земной поверхностью, дальностью прямой видимости R (рис. 5.10). Если высота цели Я, а высота подъема антенны /?а, то при учете рефракции в стандартной атмосфере /? 3 = 4,i2(v77+V;), (5.10) где при Я и Ла, выраженных в метрах, R получается в километрах.
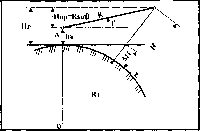 Рнс. 5.10. Дальность прямой видимости Рис. 5.П. Связь истинной и приведенной высот цели Кроме того, сферичность Земли требует коррекции соотношения для вычисления высоты цели: Н=Ну+АН . Если не учитывать сферичность земной поверхности, то как следует из рис. 5.11, высота цели над плоскостью горизонта, H = h + /?sinp . При введении коррекции высота Я = Яр + АЯ , где при стандартной атмосфере поправка АЯ= АЯ = R/(2R) . Из-за сферической поверхности Земли отраженные от нее радиоволны расходятся. Это приводит к уменьшению коэффициента отражения, что следует принимать во внимание при расчете/i(P). Уменьшение коэффициента отражения учитывается коэффициентом сферической расходимости Кф< I: где /Sfoips и Коту, - результирующий и исходный коэффициенты отражения от земной поверхности. Зоны обнаружения (зоны видимости). Используя зависимость Клах - iiiaxo/s(P) можно построить в полярной системс координат график /?д(р)для контура зоны в вертикальной плоскости, в пределах которой цель с известной Sq обнаруживается с заданными вероятностями правильного обнаружения D и ложной тревоги F радиолокатором с параметрами Pi, Gal, Ga2, Ци Цг, X. Однако такой график не дает полного представления об особенностях зон обнаружения, поэтому его принято строить в декартовых координатах (/?тах, Я), используя формулу для Яг, но при этом не учитываются рефракция и кривизна Земли. В связи с этим графики зон видимости корректируют. Для учета рефракции расчет ведется для стандартной атмосферы и R заменяется на /?,эф=(4/3)/?з. Кроме того, оставляя траектории радиоволн прямолинейными, преобразуют прямоугольную систему координат в криволинейную, переходя к координатам наклонная дальность - приведенная высота . Под приведенной высотой понимают высоту цели над горизонтальной плоскостью (ПГ), проходящей через антенну. Приведенная высота Яг,р связана с истинной высотой цели Я следующим соотношением (рис. 5.12): Ha полученной таким образом зоне обнаружения в вертикальной плоскости (рис. 5.12) обычно указывают линии равных истинных высот и линии равных углов места.
Рис. 5.12. Зоны обнаружения в вертикальной плоскости для радиолокатора Утес-Т (светлая зона - работа на одной частоте, темная зона - на двух частотах) 5.1.3. Обзор пространства в РЛС Поиск или обнаружение целей в заданной области пространства называется обзором пространства. Время обзора, т.е. однократного просмотра области обзора, зависит от размера этой области, заданного качества обнаружения и способа обзора. Обзор пространства в однопозиционных РЛС. Рассмотрим параметры обзора при параллельном и последовательном обзоре пространства. При параллельном обзоре весь телесный угол области обзора плотно заполняется парциальными пересекающими по уровню половинной мощности лучами с телесным углом каждого, равным угловому элементу разрещения. При этом в пределах каждого парциального луча обнаружение производится по всей дальности последовательно за время приема пачки отраженных импульсов т = Г , где число импульсов в пачке п определяется заданным значением пороговой мощности. Таким образом, время обзора пространства To6,=t = r сокращается при усложнении РЛС за счет формирования многолучевой ДНА. При последовательном обзоре луч ДНА плавно или ступенчато перемещается в заданной области обзора, находясь в каждом направлении в течение времени т = пТа. При механическом вращении ДНА используется плавное перемещение, а при электронном - ступенчатое. При плавном перемещении луча время обзора определяется законом и скоростью движения луча (ПобО- Значение Побз ограниченно сверху условием (ро,5(обз)~>Тп= = 7 , т.е. Поо1<фо,5(7 ) . Из щироко используемых способов последовательного обзора рассмотрим круговой, винтовой и секторный. При круговом обзоре (рис. 5.13, а) пространство обзора ограничено координатами 0< R< R,, О< or < 360° и О< р< фо53. Время обзора можно определить, используя соотнощение Гоб,=360°(По(л)~360° Т (фо,5в)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||