
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание г - коэффициент, связывающий ап - СКП определения МП с ст , -СКП измерения W: <7мп Гст . На основании сказанного ап может быть найдена только при анализе системы (Г) и при независимости погрешностей, вносимых всеми элементами системы: вмп где М - масштабный коэффициент или коэффициент пересчета результатов измерения © в значения Ж; Г - геометрический фактор; Стпрд -СКП формирования и генерирования сигнала в передатчике; Стер - СКП распространения сигнала в среде; ст зм - СКП измерения параметра сигнала; Стрэ- СКП расчета геометрического элемента; Ствмп- СКП вычисления местоположения. Погрешности СТпрд и СТвмп могут быть сведены к приемлемому минимуму при тщательном конструировании аппаратуры, а составляющая Стер зависит от рабочей частоты системы, типа ее антенн, характера окружающих РЛС и ОЛ предметов и ряда других специфических факторов. Рассмотрим основные причины снижения точности определения местоположения. 5.2.2. Точность определения геометрического элемента В РЛС связь определяемого геометрического элемента Ж (координат объекта) с измеряемым параметром сигнала v дается уравнением W = Mv, (5.11) которое является исходным при нахождении погрешности определения W. Находя полный дифференциал (5.11) и переходя к конечным приращениям, получим AW/W = AM/M + Av/v, (5.12) где AM и Av имеют смысл текущих значений погрешностей, обусловленных нестабильностью масштабного коэффициента и недостаточной точностью измерительного устройства. Возводя обе части выражения (5.12) в квадрат и усредняя полученный результат в предположении независимости погрешностей AM и Av, получаем уравнение, связывающее дисперсию погрешности afy определения элемента Же дисперсиями о и о : <ryy/W = [(<T/M)+i<rJvff . (5.13) Из этого уравнения следуют два направления уменьшения погрешности и в итоге повышения точности местоопределения. Первое связано с уменьшением погрешности сгд которая тем меньше, чем выше стабильность масштабного коэффициента. Поэтому при проектировании РЛС обычно принимают меры по стабилизации масштабного коэффициента (или учитывают, если это возможно, его нестабильность). При выполнении условия yV/=const уравнение погрешностей (5.13) принимает вид а у = Л/сг . При оптимальном построении измерителя сг стремится к минимуму, называемому потенциальной точностью. Неоптимальность схемы измерителя информационного параметра сигнала приводит к росту погрешности по сравнению с потенциальной. 5.2.3.Погрешность определения линии положения Если местоположение объекта на плоскости находится на пересечении двух линий положения (ЛП), то погрешность местоопределения будет зависеть от погрешности Д/ нахождения каждой из них, за которую обычно принимают минимальное расстояние в точке расположения объекта (цели) между истинной ЛП и ЛП*, найденной по результатам определения элемента Ж (рис, 5.17). Примем, что погрешность определения W равна AW и имеет, как и А0, гауссовский закон распределения с нулевым средним значением. Элементу W на плоскости соответствует семейство ЛП. Это семейство можно представить как скалярное поле элемента W, причем линии уровня этого поля и есть ЛП, Воспользовавшись теорией скалярного поля, можно найти градиент изменения элемента W: \grdidW\ = dW/dl, который представляет собой вектор, перпендикулярный линиям положения и направленный в сторону возрастания W. Переходя к конечным приращениям, получаем А/ =-?-AW=K AW, (5.14) где ЛГ - коэффициент погрешности определения ЛП (единицы длины/единицы параметра). При гауссовском законе распределения погрешностей AW погрешности А/ также распределены по гауссовскому закону, как правило, с нулевым средним значением и дисперсией Стлп- Возводя обе части равенства (5.14) в квадрат, усредняя и извлекая квадратный корень из результата, находим m-fnntl , (5.15) где и G(v - СКП нахождения линии положения и определения элемента. Из (5.15) следует, что при одной и той же погрешности csw можно снизить погрешность G n, непосредственно влияющую на точность место-определения, уменьшив коэффициент К п, который зависит от вида ЛП. Для нахождения К н необходимо представить W как функцию координате, К прямоугольной системы координат. Тогда , .-1-1/2 -W dx (5.16)  ЛПЛЦ 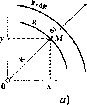 ЛП лп .V о 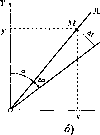 Рис. 5.17. Семейство ли- Рис. 5.18. Пофешность определения линии положе-ния НИИ положения при измерении дальности (а) и азимута (б) Например, найдем Кп для наиболее распространенных дальномер-ного и угломерного устройств. В радиодальномерах определяемый элемент записывается в прямоугольной системе координат (рис. 5.18, а) так: W = R = {x +у), и линии положения представляют собой окружности с центром в точке установки радиодальномера. Тогда gradj = 1 и Л лп=1- Следовательно, aj,n=a/<. Таким образом, при заданной погрешности радиодальномера (Зц погрешность определения ЛП постоянна и не зависит от дальности. В радиопеленгаторе, установленном в точке О (рис. 5.18, б), определяется, например, азимут а. Элемент W в прямоугольной системе координат записывается так: W = а = arctg(x / у), откуда grad=(x2+/) = /?-. Следовательно, G =RGa. Таким образом, при заданной погрешности угломерного устройства погрешность определения ЛП (ради-
|