
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание в системах, состоящих из однотипных устройств, Gm=aw2=Gif. Коэффициент корреляции погрешностей р принят равным нулю. Приближенные выражения справедливы когда /?o/Bik l. Для всех однобазовых систем (л = 1) точность местоопределения максимальна на перпендикуляре к базе, т.е. при 9о= 7г/2. 5.2.5. Рабочие зоны РЛС Рабочая зона - важнейший тактический параметр, позволяющий определить число и целесообразное взаимное размещение РЛС в данном районе. Для построения рабочей зоны можно воспользоваться данными табл. 5.2 или более простым выражением (5.16) в зависимости от известных разработчику параметров системы. Обычно известны значения погрешностей устройств системы Gwi Ст vi допустимое значение погрешности местоопределения а пд, и для расчета границы рабочей зоны пригодно выражение (5.17). Построим рабочую зону для угломер- 23. Рабочая -юна дадьно но-дальномерной (дальномерно-пеленгаци- мернопеленгационной (угломер-онной) системы. Пусть в точке О (рис. 5.23) но-дальномерной) системы находится радиолокатор. В такой угломерно-дальномерной системе у=90°. Рабочая зона имеет форму окружности с центром в точке О и радиусом, определяемым из выражения, приведенного в табл. 5.2. Таблица 5.3 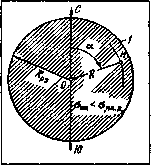
Контрольные вопросы 5.1. При заданных параметрах импульсного радиолокатора Pi = 100 кВт, d = l м, к = 3 ш, Р ор= 10 Вт рассчитайте дальность действия /?,пахо для случая обнаружения потребителя и крылатой ракеты. 5.2. Пороговая мощность при обнаружении цели ЛюрЮ Вт, и в режиме измерения (/*2пт)изм =10 * Вт. Сравните дальность действия радиолокатора в режиме обнаружения и измерения. На сколько надо увеличить излучаемую мощ- пость в режиме измерения, чтобы дальность действия радиолокатора была такой же как и в режиме обнаружения. 5.3. Найдите дальность действия системы с активным ответом при следующих параметрах запросчика и ответчика: Рз= 100 кВт, г/аз= I м, ?v = 10 см, антенна ответчика ненаправленная, полоса пропускания приемника-ответчика в 6 раз больше полосы приемника-запросчика, приемники имеют одинаковые коэффициенты шума. 5.4. Дальность действия навигационного радиолокатора при высоте полета ЛА Я=10 км должна быть не менее 150 км. Найдите значения для Р, в пределах которого диаграмма направленности должна аппроксимироваться функцией /(р) = cosec рcosp . 5.5. Найдите далыюсть обнаружения цели /?, . в пассивных РЛС, если известно, что Ф\0 = 0,9) =1,2, Г) = 0,6, Л а= 0,5, при следующих параметрах: 1)т =0,1 и Юс; 5) Г,Л-=100и 1000; 2) а/у = 1 и 10 МГц; 6) т к= 100 и I ООО; 3) д=0,8см, 3.2см. 10см; 7) е = 0,37 (вода), 0,94 (трава) 4)ДГ=25и100; при=30-45°. 5.6. Дальность действия активной системы в свободном пространстве 7?п,ахо = 150 км. Постройте зависимость дальности действия от интенсивности дождевых осадков, приняв = (10... 100) мм/ч, к = 0,8 см. 5.7. Рассчитайте и сравните дальность действия активной системы в атмосфере, работающей при X = 0,5 и 0,8 см. 5.8. Рассчитайте мощность Pj передатчика импульсной РЛС при затухании радиоволн а = О, I дБ/км, если при той же дальности /?, ахо 100 км в свободном пространстве мощность передатчика pi = 100 кВт. 5.9. Рассчитайте дальность действия прямой видимости, если высота подъема передающей антенны /г= 40 м, высота цели Я= 10 км. 5.10. Высота подъема передающей антенны = 900 м, измеренное расстояние до цели R = 800 км, цель видно под углом р = 6°. Найдите высоту Н цели над поверхностью. 5.П. Для условия задачи 5.10 найдите приведенную высоту цели И р. 5.12. Производится параллельный обзор заданной области пространства, при этом в пределах каждого параллельного луча выполняется когерентная обработка 15 импульсов. На сколько увеличится время обзора при переходе к когерентной обработке? 5.13. Найдите угловую скорость вращения антенны при последовательном обзоре, если X = 3 см, D= 1 м, F = 400 Гц, /т = 15. 5.14. Рассчитайте коэффициенты к\ и к2 для РЛС со следующими параметрами: Р = 90 кВт. а = 2 м, 6 = I м, so= 5 м , р = 10 Вт. 5.15. Постройте зависимость дальности действия РЛС R от интенсивности осадков б = ( 10 - 100) мм/ч при X. = 3 см, X = 10 см. Глава 6. Помехи радиолокационным системам 6.1. Общие сведения Помехами могут являться любые воздействия, снижающие эффективность РЛС, т.е. уменьшающие дальность действия и точность измерений. К числу таких помех относятся электромагнитные воздействия, которые ухудшают тактические характеристики РЛС, мероприятия, снижающие наблюдаемость целей, а также специальные приемы, в том числе организационные, нарушающие нормальную работу РЛС. По характеру возникновения электромагнитные помехи разделяются на пассивные и активные, а в зависимости от причины возникновения - на естественные (неорганизованные) и умышленные (организованные). Кроме того существуют и комбинированные помехи. Пассивные помехи создаются отражениями радиолокационных сигналов от объектов, находящихся в зоне обзора РЛС. Естественные пассивные помехи это отражения от земной и морской поверхностей; местных предметов; метеообразований или гидрометеоров (дождь, снег, туман); атмосферных неоднородностей (следы метеоритов в атмосфере, молнии, ангелы и т.п.). Умышленные пассивные помехи это отражения от облаков дипольных отражателей, аэрозолей или ионизированных частиц, а также отражения от ложных целей. К числу особенностей пассивных помех относятся: - появление их только при работе передатчика радиолокаторов; - расположение источника помехи либо в одном элементе разрешения с полезной целью, либо в непосредственной близости от него; - значительное превышение мощности помехи над мощностью собственных шумов приемника (динамический диапазон пассивных помех, т.е. отношение мощности пассивной помехи к мощности шума Рпп1Рш может достигать 90 дБ); - отличие пассивных помех от сигналов, отраженных от движущихся целей, из-за разных динамических характеристик отражающих объектов (радиальная скорость, ускорение и т.п.) или статистических характеристик (корреляционная функция или спектральная плотность мощности) самих помех.
|