
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание Несмотря на то, что были разработаны РГФ, работающие на промежуточной частоте, например так называемые векторные компенсаторы или устройства с объединением выходов фильтров, имеющих разные АЧХ, в настоящее время используются исключительно цифровые РГФ (ЦРГФ). Цифровые РГФ подавления помех требуют предварительного преобразования сигналов в цифровую форму с помощью АЦП. В таких устройствах используется двойная дискретизация сигнала: по времени с дискретом Д/д = г и по уровню с квантом Дм = , где - среднеквад- ратическое значение шумового напряжения. При этом динамический диапазон = w ,axAmi = гаах/ш трсбусмос ЧИСЛО ДВОИЧНЫХ разрядов кода т = 1о§2 d . Следовательно, отношение динамического диапазона сигналов или помех на входе АЦП (в дБ) к числу двоичных разрядов yt, = = 6 дБ/разряд, log, с/ При известном динамическом диапазоне (дБ) число разрядов АЦП m = d/ki =d/6. Быстродействие АЦП определяется затратами времени на преобразование, которые должны быть меньше длительности временного дискрета, т.е. Д = т / m. В настоящее время используются АЦП с быстродействием, характеризующимся частотой дискретизации/=1/Д/<100 МГц, например, АЦП AD 6644 фирмы Analog Device (США) имеет/=65 МГц при 14 разрядах кода, динамическом диапазоне 73 дБ и частоте входного сигнала 39 МГц. Если быстродействия АЦП недостаточно для преобразования сигналов промежуточной частоты, то переходят к ЦОДЦ и ЦРГФ в виде комплексных фильтров с двумя квадратурными каналами, в которые включены два АЦП. После подавления помех используется оптимальная междупериодная обработка сигнала на фоне белого шума. Обычно в системах ЦОДЦ для этого применяют когерентное либо некогерентное накопление модулей или квадратов остатков вычитания. При когерентном накоплении вводится поправка в фазу сигнала для компенсации движения цели. В самом деле, если известна (измерена) доплеровская частота сигнала цели, то набег фазы за период повторения yz-ClJ. Пусть принимаемый сигнал в -М периоде повторения Ч, =сехр{У( ( + (о)}. где /7 = 0,1,2,...; у/, - начальная фаза. Набег фазы нужно компенсировать с помощью сигнала S , чтобы = 5 м , т.е. S = и/и , поэтому = exp[-y(w + о)] = (U cos nif/ - Vy sin /7) -- j{V s\x\nii/ + Uy cos ni ), где U, = cos vj/o ; Uy = sin \/o. Таким образом, в двух квадратурных каналах в w-m периоде повторения по известному значению v/ формируются поправки, обеспечивающие когерентность накопления. При когерентном накоплении остатков вычитания в ЦОДЦ (см. рис. 7.17) помехи в квадратурных каналах подавляются ЦРГФ, содержащим общие для квадратурных каналов запоминающее (ЗУ) и арифметическое (АУ) устройства в каждом канале. После ввода компенсирующих поправок блоком БВП сигналы интегрируются цифровым полосовым гребенчатым фильтром (ЦПГФ), реализованным на процессоре и содержащим ЗУ р . структурная схема цифрового ОДЦ с когерентным ин-для двух квадра- тегрированием остатков вычитания турных каналов и АУ для каждого канала. Квадрирующие устройства обеспечивают на выходе сумматора квадрат амплитуды сигнала движущейся цели, а цифроаналоговый преобразователь (ЦАП) преобразует цифровой код сигнала в импульс цели, который затем направляется на обнаружитель и индикатор. Из-за сложности ввода компенсирующих поправок, особенно при одновременной обработке сигналов нескольких целей, необходимо перейти к многоканальным системам подавления помех. Структуру ЦОДЦ можно упростить, перейдя к некогерентному накоплению. В этом случае БВП, показанный на рис. 7.17, не требуется, и ЦПГФ подключается после объединения квадратурных каналов. Фильтровые устройства подавления помех. Реализация фильтровых устройств возможна на цифровых фильтрах с быстрым преобразованием Фурье (БПФ) или на микропроцессорах. Типовое фильтровое устройство ОДЦ (рис. 7.18) многоканально по дальности (т каналов) и 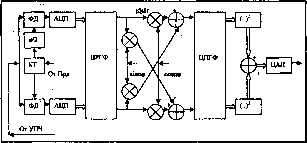
ОгКГ 1© Рис. 7.18. Структурная схема цифрового фильтрового устройства ОДЦ скорости ( каналов). Каналы дальности реализуются либо с помощью селекторов дальности в УПЧ, либо с помощью коммутации ячеек ОЗУ. Каналы скорости образуются цифровыми фильтрами с помощью БПФ. Селекторы дальности (СД) обеспечивают поступление в каждый из т каналов сигналов только с одного элемента разрешения по дальности. Гребенка фильтров Ф-.Ф предназначена для селекции по скорости в пределах диапазона частот от до + F /2 . В цифровом фильтровом устройстве ОДЦ с подавлением помех информация в ЦРГФ (рис. 7.18) записывается в оперативное запоминающее устройство (ОЗУ), а затем фильтруется на основе /7-точечного, алгоритма БПФ. Качество работы устройства ОДЦ офаничивают априорная неизвестность и изменчивость статистических свойств пассивной помехи. Вследствие этого возникает необходимость в самонастраивающихся, или адаптивных системах ОДЦ. Наиболее часто приходится считаться с изменением средней частоты спектра и формой спектра пассивной помехи. Устройства компенсации движения пассивной помехи. При движении радиолокатора относительно создающих пассивную помеху неподвижных объектов (например, при полете носителя радиолокатора и отражении сигналов от земной поверхности) составляющие спектра помехи сдвигаются на частоту Доплера и могут попасть в области прозрачности АЧХ устройства ЧПВ (ЧПК). В этом случае может сработать ОДЦ и возникнет ложная тревога. Для компенсации доплеровского сдвига частоты пассивной помехи ( остановки помехи ) вводят поправку в частоту сигнала когерентного гетеродина. При автоматическом вводе поправки (рис. 7.19) устройство ЧПК, работающее на промежуточной частоте, формирует сигнал, пропорциональный QanTii, где Одп - доплеровский сдвиг частоты пассивной помехи. Для оценки Qn необходимо усреднить по ансамблю значения сигналов, отраженных от одного и того же элемента разрешения по дальности. Однако в этом случае процесс оценивания, а следовательно, и адаптации затягивается на большое (не менее 10) число периодов по-
|
||||||||||||||||||||