
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание 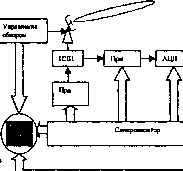 Процвосор СНП1ММ1 (О6жботи шталоо) I(p0i№ccup (фйрмнрмашм вшетока 4.4> м- Рис. 2.2. Структурная схема РЛС обнаружения воздушных целей Эта операция выполняется переключателем прием-передача (ППП). Пусковые импульсы, задающие период повторения зондирующих сигналов и синхронизирующие работу всех подсистем ОПРЛС, генерирует синхронизатор (Синх). Сигнал с приемника (Прм) после аналого-цифрового преобразователя АЦП поступает на аппаратуру обработки информации -процессор сигналов, где выполняется первичная обработка информации, состоящая в обнаружении сигнала и измерении координат цели. Отметки целей и трассы траекторий формируются при вторичной обработке информации в процессоре данных. Сформированные сигналы вместе с информацией об угловом положении антенны передаются для дальнейшей обработки на командный Р с. 2.3. Обзорная РЛС УВД Днепр пункт, а также для контроля на индикатор кругового обзора (ИКО). При автономной работе радиолокатора ИКО служит основным элементом для наблюдения воздушной обстановки. Такая РЛС обычно ведет обработку информации в цифровой форме. Для этого предусмотрено устройство преобразования сигнала в цифровой код (АЦП). Бистатические радиолокационные системы (БиРЛС) представляют собой РЛС, в которых передающая и приемная части расположены в различных точках пространства (см. рис. 2.1, г). Такие БиРЛС основаны на активном виде радиолокации. Ба, БиРЛС  D Бое Bad Бве БиРЛС2 БиРЛС, БиРЛС5,БиРЛСв ОЛРЛС! Прд-Прм  оПрм 2.2. Многопозиционные радиолокационные системы Миогопозициоиные радиолокационные системы (МПРЛС) (рис.2.4) в общем случае объединяют однопозиционные (ОПРЛС 1 и 0ПРЛС2), бистатические (БиРЛС! - БиРЛСб) и пассивные (ПРЛС1 -ПРЛС4) РЛС, расположенные в различных точках пространства (позициях). Расстояние между пози- Бег/ f БиРЛС ОПРЛСг Прд-Прм Рис. 2.4. Возможная структура МПРЛС 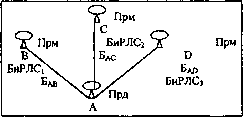 циями РЛС называется базой (Б). На рис.2.5 показана структура МПРЛС, имеющей общую передающую и три разнесенные приемные позиции. Такую МПРЛС называют полуактивной. Частным случаем полуактивной системы является БиРЛС. Многопозиционные РЛС имеют несколько баз, которые обозначаются Ejk, где индексы j \л к соответствуют номерам или названиям позиций. Следует отметить, что в зависимости от тактического назначения МПРЛС и размещения ее Рнс.2.5.Сук.ураМПРЛС.сосгоя1цсГппБпРЛС элементов базы системы МО- гут менять положение и размеры при перебазировании системы или при размещении аппаратуры МПРЛС на подвижных объектах, в том числе на атмосферных ЛА. Часто используется смешанное базирование МПРЛС, например, передающая аппаратура на ЛА, а приемная на Земле, и наоборот. Если при перемещении или перебазировании взаимное расположение позиций не изменяется, т.е. B/A=const, то такие МПРЛС называют МПРЛС с неподвижными базалш. Все другие системы составляют группу МПРЛС с подвижны.ми базами. В современных МПРЛС используются как отдельные виды радиолокации, так и их совокупность, в них также можно применять различные методы определения местоположения целей в пространстве. Эти особенности приводят к большей помехозащищенности системы в целом. При разнесении РЛС в пространстве на каждой позиции может размещаться приемная аппаратура (пассивная МПРЛС), приемная и передающая аппаратура {пассивно-активная МПРЛС) или аппаратура ОПРЛС {активная МПРЛС). 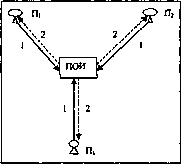 Рис. 2.6. МПРЛС Обобщенная структура В обобщенной структуре МПРЛС (рис. 2.6) можно выделить основные компоненты системы: аппаратуру разнесенных позиций (П), каналы передачи информации (I), каналы синхронизации (2) и пункт обработки информации пои, где поступающие от разнесенных позиций сигналы и информация объединяются и обрабатываются совместно, что позволяет реализовать ряд преимуществ МПРЛС перед однопозиционной РЛС. Основные из этих преимуществ: возможность формирования сложных пространственных зон обзора; лучшее использование энергии в системе; большая точность измерения местоположения целей в пространстве; возможность измерения полного вектора скорости целей; повышение помехозащищенности по отношению к активным и пассивным помехам, а также увеличение надежности выполнения тактической задачи. Однако эти преимущества достигаются ценой увеличения сложности и стоимости системы. Возникает необходимость синхронизации работы позиций (в том числе и при обзоре пространства) и организации линий передачи данных. Возрастает и сложность обработки информации из-за большого ее объема. Однако, несмотря на указанные недостатки, МПРЛС получили широкое распространение в практике радиолокации. В зависимости от задачи, решаемой в процессе обработки информации в МПРЛС, различают первичный, вторичный и третичный виды обработки. Первичная обработка заключается в обнаружении сигнала цели и измерении ее координат с соответствующими качеством или погрешностями. Вторичная обработка предусматривает определение параметров траектории каждой цели по сигналам одной или ряда позиций МПРЛС, включая операции отождествления отметок целей. При третичной обработке объединяются параметры траекторий целей, полученных различными приемными устройствами МПРЛС с отождествлением траекторий. Виды многопозиционных РЛС. В зависимости от использования на разнесенных в пространстве позициях фазовой информации, содержащейся в отраженных от цели сигналах, различают МПРЛС пространственно-когерентные, с кратковременной пространственной когерентностью и пространственно-некогерентные. Под пространственной когерентностыо понимают способность сохранять жесткую связь фаз высокочастотных сигналов на разнесенных позициях. Степень пространственной когерентности зависит от длины
|