
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание 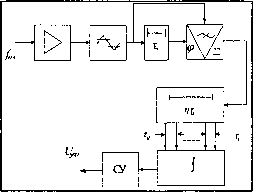 вторения. Считая помеху однородной и эргодичной по пространству, усреднение по времени заменяют усреднением по ансамблю множества соседних элементов разрешения. Сигналы с фазового детектора вводят в линию задержки (ЛЗ), число отводов которой должно обеспечивать достаточ- Рнс. 7.19. Структурная схема устройства автомати-ность статистики помехи у у ческого ввода частотной поправки в сигнал коге-и лежит в пределах 8-64. рентного гетеродина Сигналы с отводов ЛЗ, задержка которых отличается на интервал времени т , соответствующий элементу разрешения по дальности, усредняются, и по полученной оценке с помощью схемы управления (СУ) формируется сигнал Uy , управляющий частотой перестраиваемого гетеродина. Устройство ОДЦ с корреляционными обратными связями. Это устройство (рис. 7.20) выполняет череспериодное вычитание с весовыми коэффициентами, пропорциональными коэффициенту междупери-одной корреляции помехи Рпп(7 ). Выходной сигнал Ли используется для формирования весового коэффициента fV. Так как ДО, зСО и Aii{t) - комплексные величины, а при перемножении , на fV необходимо получить вещественную величину, W должен быть пропорционален величине, комплексно сопряженной с м,. Входной сигнал умножается на W и вычитается из задержанного сигнала 2. Составляя уравнения функционирования схемы и считая г/,(/) пассивной помехой, получаем д (о= 2(0- ;с .(о, Ко=р[А (о ,(0], где Р - коэффициент усиления разомкнутой петли обратной связи. Отсюда [р 2(0 .(0] рр (7-п) 1+р ,(0 1 + Р(о )- Mi(/) aa(/) a при р>1 Пс=р (7;), поэтому 1 =[Au(t)f=[uit-TJ-Wu{t)f =a-2p(p)+pia=a\\-pl). Следовательно, (т=ау]\\-pl {T )] , и когда помеха сильно кор- релирована и(1-Т ) = U(t), остаток помехи стремится к нулю Аи и1-р1{Т ) О , поскольку р - 1. Основным достоинством рассмотренной схемы с корреляционной обратной связью (КОС) является самонастройка на характеристики помехи или адаптация системы к ним, в результате чего система отслеживает изменения ширины спектра (корреляционной функции) помехи. Для самонастройки на скорость движения помехи или, точнее, на доплеровский набег фазы ОГ за период повторения необходимо перейти к схеме с двумя квадратурными каналами, каждый из которых построен по схеме, показанной на рис, 7.20. К числу недос-Рис. 7.20. Структурная схема устройства одц с татков схемы с КОС отно-корреляционной обратной связью .ся значительное время (несколько периодов повторения), необходимое для выработки установившегося значения междупериодной корреляционной функции пассивной помехи. Поэтому первые периоды повторения занимает процесс установления, и компенсация помехи оказывается недостаточной, что приводит к явлению неподавленной кромки помехи . Особенности устройств ОДЦ при работе радиолокатора в импульсном режиме. Основным фактором, влияющим на построение устройств ОДЦ при импульсном характере сигнала, является скважность зондирующего сигнала. При высокой скважности (7;/т >100) предпочтение отдают подавителям пассивных помех на базе устройств ЧПВ, а при малой скважности (7 /т < 10) - как правило, фильтровым устройствам подавления пассивных помех. В импульсных системах с малой скважностью выбор частоты повторения зондирующих импульсов связан с широкополосностью отраженных от подстилающей поверхности пассивных помех. Пусть летящий над земной поверхностью ЛА оборудован радиолокатором, ДНА которого состоит из главного лепестка и множества боковых (рис. 7.21, а). Цель находится в главном лепестке ДНА, а отраженные от земной поверхности сигналы принимаются всеми ее лепестками. Для расчета спектра отраженных сигналов можно использовать простейшую аппроксимацию реальной ДНА главным лепестком и сплошной сферой боковых лепестков. Компоненты спектра отражения при излучении импульсного сигнала малой скважности и аппроксимированной ДНА состоят из пьедестала, обязанного отражениям по сфере боковых лепестков, и гребня, обязанного главному лепестку. Протяженность спектра (от до ) определяется скоростью перемещения антенны относительно подстилающей поверхности. Поэтому при размещении радиолокатора на автотранспорте и морском транспорте спектр пьедестала помех получается узким, в то время как при размещении радиолокатора на самолетах и вертолетах спектр помех расширяется. При поиске целей в передней полусфере на встречных курсах, до-плеровская частота сигнала цели больше доплеровской частоты сигналов, отраженных от Земли. Тогда для обнаружения сигнала в окне , свободном от помех, обусловленных земной поверхностью, нужно выполнить условия: /о цтах /о - зтах fo umiii Уо зтах Второе условие не зависит от параметров радиолокатора, а первое дает соотношение для выбора частоты повторения: п дцтах дзтах 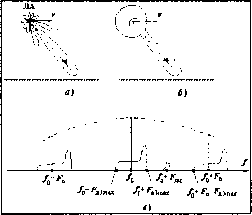 При небольшой скорости относительного движения радиолокатора и цели получаются низкие значения Fn, обеспечивающие однозначность измерения дальности. Такие системы называются тт... Рис. 7.21. Реальная ДНА бортового радиолокатора (а), системами малой скваж- аппроксимация (б) и спектры принимаемых сигна-ности с низкой частотой лов (в)
|