
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание Р(0г=о = - i2nf IE f\S{ffdf. Запишем выражение для среднеквадратической (эквивалентной) ширины спектра сигнала: Г SifVdf f S{f)-df = JCK S(f)df тогда сг: = 2(ЕУ др{т) /V (/V + £)ar-,= No{N + E) Обозначая, как всегда, E/Nf = q и E/NQ=q , получаем 1 l + <7 2{qY {2nU 2 (9.21) Пример 3. При расчете потенциальной точности измерителя смещения частоты сигнала со случайной фазой и флюктуирующей амплитудой (см. гл.З) f/(/, а, ,ft>) = V2af/, (е) cos[ (бУц + й )/+ (/) + составим отношение правдоподобия N, + E [N.iN. + E)} где Z{co) = - модуль корреляционного интеграла. Оценка максимального правдоподобия определяется из уравнения () Q приводит к схеме измерителя (рис. 9.10), состоящей из т каналов, содержащих оптимальные фильтры, детекторы и схему выбора максимума. Аналогично расчету потенциальной точности измерителя времени запаздывания производится расчет потенциальной точности измерителя смещения частоты: (9.22) где t - среднеквадратическая (эквивалентная) длительность сигнала: U,(t)dt UAtydt ОФ1 -► Д Схема выбора макси -мума Рис. 9.10. Схема измерителя частоты Пример 4. Рассмотрим измеритель угловой координаты при обзоре в горизонтальной плоскости и пеленгации по методу максимума. При плавном обзоре пространства & = a = D.t (а - угол поворота антенны; Q - угловая скорость обзора) огибающая пачки на выходе приемника U Xt,o() = f/o/,[Q(r - г)]. Таким образом, сг = Qcr. Пеленгационная характеристика может быть представлена в виде / (а) = ехр{-л-(а/аГо)2}, где tta - ширина пеленгационной характеристики на уровне 0,46. При этом огиб где г , б=аГо/а. Следовательно, поскольку /. =N/Aor 6 > получаем 2n{qy <т1 = \+q 2 -То 2n{qf Так как af, =к-, где d - диаметр антенны, d 2я{яУ (9.23) Очевидно, что повышение точности оценки возможно за счет увеличения q или за счет/ск, но q не может быть больше чем = E/Nq , и целесообразно использовать сигналы с максимальным /. Например, спектр сигнала с балансной модуляцией несущего колебания гармони- ческим колебанием состоит из двух компонент, расположенных по его краям (рис. 9.11, а). При этом энергия одной составляющей E =Ul/2,a общая суммарная энергия сигнала E=2E=lJl,. Тогда эффективная ширина спектра этого сигнала Такой сигнал будет реализовывать наилучшую точность оценки, поскольку получаем наибольшее f = А 2. При использовании ЛЧМ-сигнала со сплошным равномерным спектром (рис. 9.11, б) в той же полосе частот, причем форма огибающей спектра может f быть аппроксимирована прямоугольником, получаем /=A l2 Рнс. 9.11. Спектры сигнапов оптимального для точных из- = А 2\1з , Т.е. мерений (о) и оптимального для разрешения целей (б) ТОЧНОСТЬ оценки при использовании ЛЧМ-сигнала в л/з раз хуже по сравнению с балансно-модулированным сигналом. 9.7. Оптимальные дискриминаторы Согласно (9.16),представим характеристику оптимального дискриминатора в виде 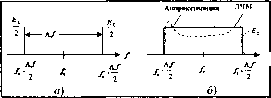 Z(0-0o) 0=0п (9.24) Если входная реализация у(@) = Uqu(@) + n{t), то Z(0-0o) = i Z(0-0 )= >(0)н*(0о)с10=-5;( )5 ( )ехр{2л- (0-0о)}й? , Я0)и (0 )с/0 = - Г .;( )5 ( )ехр{/-2л- (0-0о)}с /, Z-(0-0 )=l я0) (0о)сЙЭ=- X.( )5 C/)exp{/-2;9/(0-0o))W . Формирование Z , Z и Z может быть осуществлено с помощью фильтров Фо, Ф и Фз, имеющих коэффициенты передачи о(р), A:i(.i) и к2{\х) соответственно, с импульсными переходными функциями
|