
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание Таким образом, в фазовом РД существуют противоречивые требования к выбору масштабной частоты: увеличение П способствует повышению точности, но приводит к неоднозначности измерения дальности. Обычно это противоречие разрешают с помощью многошкальных (т.е. работающих на нескольких масштабных частотах) измерителей. Что касается величины а, то для различных измерителей фазы ее можно представить в виде где К о >1 - коэффициент потерь при неоптимальной обработке, зависящий от вида ИФ; ~ отношение сигнала к шуму по мощности на входе ИФ. Если К о=и то отношение (/*с/ш)изм = 2(/свх/швх) = 2<5вх, и точность фазового РД характеризуется погрешностью Принцип действия следящего фазового РД. Такой РД (рис. 10.2) служит для автоматического сопровождения цели по дальности. На фазовый детектор следящего измерителя фазы (СИФ) приходит опорный сигнал от ГМЧ с мгновенной фазой ср, =cpo,+л/2+(рфз и отраженный сигнал с фазой (Р2=Фо,+П,Л, где (рфз - сдвиг фазы в управляемом фазовращателе. В этих условиях выходное напряжение фазового детектора где /Сфд - коэффициент передачи 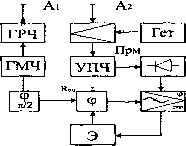 Рис. 10.2. Структурная схема следящего фазового рд фазового детектора. Так как ф,-фз =ффв+л-/2-П то U = KJJ, iU 2sin{-Qj ) и формируется дискриминационная характеристика с нулем в точке ффв = мл, положительной ветвью при ффв > 0 л и отрицательной при 4>фв < MR- Напряжение f/фд поступает на экстраполятор (Э), состоящий обычно из определенного числа интеграторов и вырабатывающий управляющее синтезатором напряжение. В качестве синтезатора используется управляемый фазовращатель со шкалой, проградуированной в значениях дальности. Принцип действия цифрового измерителя фазы (фазового РД). Измерение разности фаз в этом случае основано на преобразовании фазового сдвига срд во временной интервал /д и заполнении этого интервала счетными импульсами. В простейшей схеме цифрового измерителя фазы срд (рис. 10.3) опорный сигнал от генератора масштабной частоты и сигнал с выхода приемника (Прм) поступают на формирователи опорных (ФОИ) и сигнальных (ФСИ) импульсов соответственно. Опорный импульс (ОИ) открывает электронный ключ (ЭК) и разрешает поступление счетных импульсов с генератора (ГСчИ) на счетчик (Сч). Сигнальный импульс (СИ) закрывает ЭК и прекращает подачу счетных импульсов на Сч. Число подсчитанных импульсов N =Ул,/Т[, где - период их следования, а знак ] [ означает округление до ближайшего меньшего целого числа. От ГМЧ Or Прм От ГСчИ  Рис. 10.3. Структурная схема цифрового измерителя разности фаз (а) и сигналы в ее характерных точках (б) С выхода счетчика снимается код, содержащий оценку дальности оц, получаемую в соответствии с вь[ражением /?o =0,5c7c.,yV. Цифровому методу измерения свойственна погрешность дискретизации AR=0,5cTc4, которая тем меньше, чем выше частота следования счетных импульсов. Следует иметь в виду, что повышение точности при более высоких частотах следования счетных импульсов требует увеличения быстродействия и емкости счетчика. 10.2. Частотные радиодальномеры Принцип действия частотного РД. Получение зависимости частоты преобразованного сигнала (сигнала биений отражецного и зондирующего сигналов) от R основано на использовании модулированных по частоте зондирующих сигналов. При линейном законе ЧМ (рис. 10.4, а) из-за запаздывания отраженного сигнала на время tn, мгновенная разность излучаемой fi и принимаемой /г частот сигналов Рб = fiiOfiiO ~ (дЛОдфк. На практике применяют периодические законы ЧМ (рис. 10.4, б-г), так как передатчики и приемники имеют ограниченный диапазон перестройки частоты. В простейшем частотном РД (рис. 10.5, а) звуковой генератор задает частоту модуляции fm и вместе с частотным модулятором формирует ЧМ-сигнал, частота которого изменяется по симметричному пилообразному закону с девиацией частоты А/ Модулированные по частоте колебания ГРЧ на несущей частоте fo (рис. 10.5, б) излучаются Рнс. 10.4. Законы изменения частоты в час- антенной Aj. В результате за- тотном методе дальнометрии: а - монотон- паЗДЫВания отраженного сиг-иый, б, в, г -периодические балансного смесителя (БС) возникают биения с частотой Fq= /i - /г] - Сигнал биений усиливается и подается на измеритель частоты (ИЧ). Зависимость частоты биений от дальности может быть получена из рис. 10.6, соответствующего участку графика /1,2(0 на рис. 10.5, б. Из Т /2 t треугольников ABC и ADE следует, что - = -, откуда 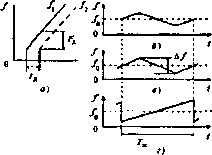 4A/f (10.3) Основное уравнение частотного радиодальномера имеет вид 4A/f = MF (10.4) где М- масштабный коэффициент. 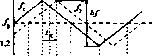 Рис. 10.5. Структурная схема частотного радиодальномера (а) н графики изменения частоты в различных точках РД (б)
|