
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание Частоту модуляции выбирают из условия однозначности отсчета дальности в пределах заданной дистанции /?, ax- При периодических законах модуляции (симметричная пила на рис. 10.5,6) получаем mc/(4/? .,J. (10.5) Кроме того, ИЧ измеряют Fq или yJiF , поэтому для того, чтобы Fg незначительно отличалась от Fq, определяемой (10.3), в частотных дальномерах выбирают Г >> еп,ах. При этом соотношение (10.5) всегда выполняется. Особенностью частотных РД является дискретный характер зависимости измеренной дальности Rvl от фактической /?ф (рис. 10.7), что вызывается периодичностью закона ЧМ, а также периодичностью смены фазовых соотношений сигналов Ui и U2 на входе смесителя. Поэтому спектр сигнала биений содержит частотные компоненты, только кратные Изменение частоты излучаемо- 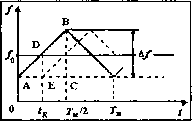 го (-) и принимаемого (---) сигналов за период модуляции частоте модуляции, причем характер нарастания частоты биений зависит от взаимного расположения векторов сигналов М] и uj. Дискрет по дальности А/?д можно найти из выражения (10.4).Так как наименьшая частота биений mill = м. то минимальное измеряемое расстояние с/(4А/). 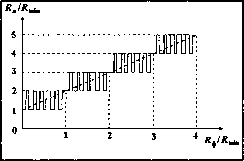 При увеличении R в спектре периодического сигнала биений последовательно появляются частоты IF, 3F , и т.д., поэтому частота р с. I0.7. Зависимость измеренной частотным биений изменяется каждый радиодальномером дальности от фактической раз на F , а дальность - на Дальности А/?д=Дополнительные скачки на ±Rmm обусловлены изменением фазовых соотношений принятого и опорного сигналов. Разрешающая способность частотного РД. Если необходимо разрешать цели по дальности или измерять дальность до всех целей. расположенных на дистанции, то в качестве измерителя частоты используют анализатор спектра. В этом случае на выходе смесителя и усилителя низкой частоты присутствуют сигналы биений всех целей (биения отраженный сигнал - опорный сигнал щ ) и сигналы биений на комбинационных частотах (биения отраженный сигнал Uc, - отраженный сигнал Иск ) N N /=1 /=1 ы\ где Мс, - отраженный сигнал от /-й цели; щ - опорный сигнал. Поскольку и, й JJm то U U, (i V, iV, k, и двойной суммой можно пренебречь. В результате на вход анализатора поступает столько биений частоты Fq сколько целей (/) находится на дистанции. При использовании параллельного анализатора спектра (рис. 10.8,й и б) получаем многоканальную систему с числом каналов, равным числу элементов разрешения: Л=(/бтах-бштУАф=(/?тах-шт)/(5/?). Время анализа определяется инерционностью фильтров: 7а=1/Аф= \I6F, где А/%, - полоса пропускания фильтра; SFg - разрешающая способность по частоте биений. При последовательном анализе спектра (рис. 10.8, в, г) аппаратура существенно упрощается, но возрастает время анализа, так как последовательный просмотр дистанции путем перестройки фильтра может выполняться со скоростью dFdt, при которой за время установления процесса на выходе фильтра Туст частота настройки фильтра изменится не более, чем на A/%j т.е. Рнс. 10.8. Структурные схемы и идеализированные частотные {FdiyiyAF. По-характеристики фильтров - анализаторов спектра сигналов в скольку Туст ~ MAF, частотном РД ТО {dFdt)<AF. 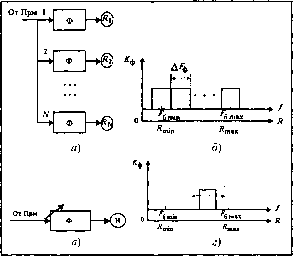 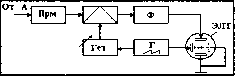 Обычно в анализаторах спектра избегают изменения АЧХ фильтра при перестройке и меняют частоту подаваемого на него сигнала с помощью преобразователя частоты (рис. 10.9).Такого же эффекта можно добиться и без преобразователя с помощью дополнительной вобуляции частоты модуляции Fu или девиации частоты А/(рис. 10.10). Разрешающая способность частотных РД характе- l* *- Структурная схема приемной части .,. 0 т . .,...... частотного РД с последовательным анализато- ризуется дискретным харак- р, спектра тером отсчетов дальности, т.е. скачками на5/?=2/?, 1п= с/2А/и разрешающей способностью анализатора спектра. Чтобы спектральные компоненты двух целей не попали в полосу прозрачности фильтра анализатора, необходимо выполнение условия SFg = 62 - б1Дф- Отсюда с учетом (10.4) получаем 3R> сАРф 4A/F к А, Ста- / Д/= const / Л л/А, /(Р)Г v,./...V-. у л 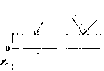 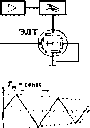 1i -ъ-м Однако улучшение bR за счет уменьшения Аф ограничено дискретностью измерения дальности и, следовательно, не может быть меньше дР = 2/?, .= с/(2А/). Таким образом, разрешающая способность частотного РД тем выше, чем больше девиация частоты, т.е. чем шире спектр зондирующего сигнала. б) в) Рис. 10.10. Структурная схема частотного радиодальномера (а) и изменения частоты сигналов при вобуляции частоты модуляции (б) и девиации частоты (в) Точность измерения дальности. На основании (10.4) и в предположении случайного характера и независимости составляющих суммарной погрешности получаем CT, = iFic7l+Mc7l.f
|