
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание отклоняющие пластины ЭЛТ приходит пилообразное напряжение развертки от генератора пилы (Г). Импульсный генератор подсвета используется для включения яркости ЭЛТ только на время прямого хода развертки. В современных импульсных РД используют цифровые ВУ (рис. 10.14). Принцип действия импульсного РД с цифровым ВУ. В цифровых ВУ временной интервал преобразуется в цифровую форму (рис. 10.15). В момент запуска передатчика импульс синхронизатора (Синх) запускает триггер (Тр) открывая схему И и разрешая прохождение счетных импульсов от ГСчИ на счетчик (СЧ). Триггер закрывается импульсом fi<m&x- Отраженный сигнал с приемника (Прм) открывает схемы И, стоящие после счетчика, и разрешает считывание кода, записанного в Сч за время t,(. Сброс счетчика р е. lо. 15. Сигналы в Хфакгерн1.гх точках-схемы рис. 10.14 и перевод триггера в исходное состояние выполняет следующий импульс синхронизатора. Схема измерения реализует разрешение целей по дальности, причем ее разрешающая способность и точность ограничены интервалом дискретизации по времени, т.е. периодом счетных импульсов Тч. Показания счетчика в соответствующем коде: N = ]/у/7е.,[. Если цель точечная, то выбор точки отсчета tn на огибающей импульса зависит от отношения мощностей сигнала и шума q. При q < 1 для повышения точности требуется оптимальная обработка сигнала, при которой форма выходного импульса совпадает с модулем корреляционного интеграла зондирующего сигнала (см. гл.З). Следовательно, при точечной цели целесообразно вести отсчет в точке, соответствующей максимальному значению q, т.е. посередине отраженного сигнала. Если q >> 1, то оптимальной обработки не требуется, полосу пропускания приемника выбирают гораздо более широкой, чем при оптимальной обработке, и отраженный импульс на выходе системы обработки сохраняет форму огибающей зондирующего сигнала. При этом ti( отсчитывают по переднему фронту импульса. Если цель протяженная, то также удобно отсчитывать по переднему фронту. Минимальная дальность дальнометрии, или мертвая зона, определяется качеством работы ППП. Обычно из-за неидеальной работы ППП антенна отключается от приемника не только на время зондирующего импульса т , но и на время восстановления исходного состояния переключателя Твос (рис. 10.16, а). Поэтому min = + W или = 0,5С(г + Т) . 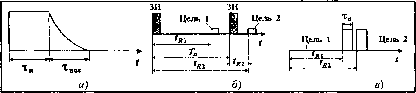 Рис. 10.16. Влияние т ,Твос и T {F ) на минимальную (/?min) максимальную {/? uix) (б) и измеряемые дальности и на разрешающую способность (6/?) (в) импульсного РД Максимтьная дтьность дальнометрии определяется условием однозначного отсчета (рис. 10.16, б), т.е. необходимо, чтобы (цтх <Т или Fn< {IRm/cjK Таким образом, целесообразно использовать низкие частоты повторения F . Однако уменьшение F снижает пороговую мощность, так как, например, при обработке пачки из п когерентных импульсов где <7пор - пороговое отношение сигнал/шум; Nq - спектральная плотность мощности шума. Число импульсов в пачке Фо.5г Фо.5гп где фо,5г- ширина ДНА; Оск - скорость ее сканирования. Если заданная дальность обнаружения Л, ах обеспечивается чувствительностью Рпорп то Обычно ,! = 5...10, откуда Fn > пйпсЛф0,5г)- Объединяя требования к частоте повторения импульсов РД, получаем Фо,5г Разрешающая способность импульсного РД (рис. 10.16, в) Точность импульсных РД. При визуальном индикаторе, выполненном на ЭЛТ, отсчитываемый интервал времени между зондирующими и отраженными сигналами отс = + + ап, где /с - задержка синхронизации, т.е. разница между началом зондирующего импульса и моментом запуска развертки ЭЛТ; /ап - время запаздывания отраженного импульса в аппаратуре РД.
Здесь первое слагаемое дает относительную погрещность отсчета времени запаздывания по индикатору РД. Нижняя граница этой погрешности определяется потенциальной точностью измерения времени запаздывания сигнала и при оптимальной обработке сигнала и отношении сигнал/шум q = E/Nq, где Е - энергия сигнала, определяется по формулам ч1/2 (10.7) где fl = [Wtdf - среднеквадратическая ширина спектра S{f) сигнала. Выражение (10.7) справедливо для сигнала с известной несущей частотой и случайной начальной фазой. При этом дальномерная погрешность Если ввести масштаб изображения М = 1 R = 2Vc, где In - расстояние до отраженного сигнала по шкале ЭЛТ; - скорость развертки, то у Ч< J
|