
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание Здесь первое слагаемое а/1 - погрешность отсчета, зависящая от диаметра пятна на экране ЭЛТ, длительности фронта импульса, скорости движения пятна и отношения мощности сигнала и шума; второе слагаемое ам/Л/ - нестабильность масштаба шкалы экрана ЭЛТ, влияние которой можно уменьшить, используя РД со стабилизацией масштаба или его калибровкой; третье слагаемое aijtu определяется нестабильностью взаимной синхронизации начала зондирующего импульса и начала развертки или шкалы отсчета ВУ. Для уменьшения влияния а, в РД используют специальный генератор пусковых импульсов - так называемый синхронизатор (см. рис. 10.13), управляющий работой всего РД, в том числе модулятора и измерителя времени. Для устранения сг, необходимо использовать в модуляторе безынерционные, или так называемые жесткие электронные приборы; четвертое слагаемое OiJtn характеризует непостоянство времени запаздывания в аппаратуре РД. Наибольший вклад в сг,а вносит приемное устройство, в котором непостоянство запаздывания сигнала связано с флуктуацией и изменением наклона фазочастотных характеристик. Для уменьшения влияния этого явления применяют параметрическую, температурную и электрическую стабилизации, а также герметизацию приемного устройства. Принцип действия следящего импульсного РД. Для автоматического сопровождения целей по дальности служат ВУ со следящими измерителями времени (рис. 10.17). Временной дискриминатор (ВД) сравнивает временные положения отраженного импульса и селекторных импульсов или временные интервалы tu и и в зависимости от величины разности л-= е- /м вырабатывает сигнал ошибки - два биполярных импульса с разной при временном рассогласовании длительностью xQ (рис. 10.18). Информация об х преобразуется экстраполятором (Э) в управляющее напряжение Ц,пр и подается на синтезатор задержки (Синт) (временной модулятор). Под воздействием С/упр синтезатор изменяет задержку селекторных импульсов. Равновесие в замкнутом кольце регулирования наступает при д: = О, а, следовательно, t = t. От Прм Смит От Синх Рис. 10.17. Обобщенная структурная схема Рис. 10.18. Сигналы в различных точках РД следящего измерителя времени ВУ им- на рис. IО 15 пульсного РД 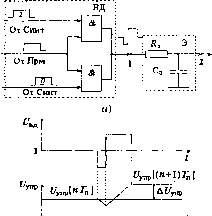 От синх
в этом режиме Ц,пр ~ R. Временной дискриминатор (рис. \0Л9,а) представляет собой две схемы И, на каждую из которых поданы отраженный сигнал и один из селекторных импульсов. Полярности снимаемых с дискриминатора сигналов совпадения импульсов (рис. 10.19,6) противоположны. Экстраполятор в простейшем случае - это интефирующая цепочка. Процессы перезаряда емкости экстраполятора представлены на рис. 10.19, б. Синтезатор представляет собой (рис. 10.19, jff) генератор селекторных импульсов (ГСИ), запускаемый задержанным по отношению к импульсу синхронизатора сигналом с амплитуд- Рнс. 10.19. Упрощенная структура временного ного компаратора (АК). В ком- дискриминатора (ВД) и экстраполятора (Э) (а); параторе сравниваются уровни РФ напряжений в точках I и 2 [б); схема г г синтезатора (в) управляющего сигнала Uyup и быстро нарастающего пилообразного напряжения генератора (Г), запускаемого импульсами синхронизатора (Синх) (рис 10.19,в). Кроме измерителя времени импульсного авто дальномера с двумя селекторными импульсами (см. рис. 10.15) извесгны измерители с одним селекторным импульсом, а также с дифференцированием отраженного импульса. Особенностью работы измерителя времени автодальномера является импульсный характер регулирования, что сказывается на условиях устойчивости замкнутой системы и характере переходных процессов. Для работы представленно- Рчс. 10.20. Структурная схема следящего им- го на рис. 10.17 следящего изме- пульсиого радиодальномера рителя времени необходим предварительный поиск цели. В режиме поиска контакт реле схемы переключения режимов (СПР) (рис. 10.20) находится в положении П и схема Прм -1 Сншс Синт 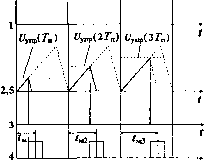 , 1 tZZH \ L поиска (СП) с помощью экстраполятора (Э) формирует медленно нарастающее пилообразное напряжение поиска, которое вместо управляющего напряжения подается на синтезатор (Синт) и изменяет задержку селекторных импульсов (рис. 10.21). Схема захвата (СЗ), на которую приходят отраженные импульсы с приемника (Прм) и селекторные импульсы от Рис. 10.21. Иллюсфация работы сиетезатора Синтезатора, переключает контакт задержки селекторных импульсов реле В положение с и переводит РД в режим сопровождения при совпадении отраженного и селекторных импульсов (рис. 10.22). Скорость поиска выбирают такой, чтобы отсутствовал пропуск цели в двух соседних периодах повторения. При скорости поиска dti/dt за время Гп селекторные импульсы смещаются на интервал, меньший длительности импульса Ти, т.е. (д tjd t)T <Xtt. Однако при захвате по одному совпадению слишком велика вероятность ложного захвата шумового выброса. На рис. 10.23 показана схема захвата, в которой эта вероятность сведена к минимуму. Сигнал совпадения отраженного и селекторных (СИ) импульсов, прошедший через первое пороговое устройство (ПУ1), запускает генератор стандартных импульсов (ГСтИ), работающий в ждущем режиме. Полученные таким образом стандартные импульсы подаются на накопитель совпадений (НС) в п следующих подряд циклах повторения, где w - не больше числа импульсов в пачке. В результате накопления сигнал на выходе НС достигает уровня срабатывания ПУ2, а при случайном шумовом выборе ПУ2 сработать не сможет. Шнек Захват Слежение Рис. 10.22. Сигналы в характерных точках схемы рис. 10.21
|