
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание Принцип действия РП, реализующего равносигнальный метод. Определение угловых координат равносигнальным методом основано на сравнении амплитуд сигналов, полученных от одного и того же источника излучения двумя антеннами, ДНА которых пересекаются в пространстве, образуя равносиг-нальное направление РСН (рис. 11.5, а,б). Антенны с диаграммами и /д2() поочередно с периодом Гк подключаются к приемнику (Прм). Одновременно выход Прм подсоединяется то к одной, то к другой отклоняющей пластине ЭЛТ. Рис. 11,5. Структурная схема радиопеленгатора. Напряжение развертки по реализующего равносигнальный метод {а), ДНЛ в вертикали формируется ге-декартовых координатах {б) и форма сигнала на . входе приемника ( ) нератором (Гр), запускае- мым импульсом синхронизатора (Синх). Равенство отклонений луча вправо и влево от линии развертки свидетельствует о нахождении цели на РСН. В момент достижения этого равенства с индикатора считывается значение угловой координаты источника излучения. Если РП работает в составе имп>Льсного радиолокатора, то по положению отметки сигнала на экране ЭЛТ относительно начала развертки определяется дальность цели. Напряжение [/в на входе Прм (рис. 11.5, в) из-за коммутации ДНА модулируется по амплитуде. Глубина AM при идентичных и симметричных ДНА v,-v, ./а(&ь+ер)-/а(ео-ер) 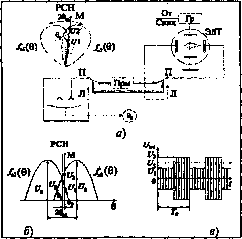 (11.4) г+ /а(ео+ер)+./а(0о-0р) Разложение функции /д(9о±Э,) в.степенной ряд по степеням Эр в окрестности точки , соответствующей РСН, имеет вид ./; (00 ± 0р) = ./а (бо) ± (0р/> 0/а(ео) + (ер/2!)Г(ео) ±... и подстановка полученных рядов в формулу (11.4) при пренебрежении высшими членами ряда ввиду их малости дает WW Эр = ПХ, (11.5) f(Q\ где rij, = -7-- - пеленгационная чувствительность (способность), из- меряемая в единицах глубины модуляции на градус углового отклонения. Таким образом, напряжение Ux содержит необходимую для определения углового отклонения 6р цели от РСН информацию: глубина амплитудной модуляции пропорциональна 6р, а фаза огибающей [Увх изменяется на обратную при изменении знака 6р. Точность РП, реализующих равносигнальный метод, зависит от формы ДНА и уровня пересечения ДНА на равносигнальном направлении (т.е. от угла вы отклонения максимума ДНА от РСН). Из (11.5) следует: Эр = т/П . Поскольку (см. рис. 11.5), то о-в = 1/(л/Пз). (11.6) Можно показать, что при любой аппроксимации ДНА пеленгационная чувствительность с учетом потерь аппроксимации и обработки равна Пд = 1 / АГфа, тогда При оптимальной обработке о-ц/ф = k/Je/Nq - минимальная относительная погрешность, соответствующая потенциальной точности измерения угловой координаты. Таким образом, точность определяется отношением мощностей сигнала и шума и значением пеленгационной чувствительности, которое зависит от У(Эо) и / (Эц) и, следовательно, от выбора уровня пересечения диаграмм. Для увеличения П необходимо увеличивать У(9о) и уменьшать /.(B), что достигается увеличением Go и уменьшением уровня пересечения, однако при уменьшении /а(6о) падает q. Поэтому обгчно 6о берут таким, чтобы пересечение диаграмм направленности по мощности происходило на уровне примерно 0,5. Принцип действия следящего РП с коническим сканированием. Рассмотренная схема (см. рис. 11.5,а) позволяет определить только одну угловую координату, например азимут а. Когда требуется одновременно измерить две угловые координаты, РСН формируется враще- нием ДНА, отклоненной на цУсм от оптической оси рефлектора антенны (рис. 11.6,йг). Максимум диаграммы смещается при механической или электрической дефокусировке облучателя. Во время работы РП диаграмма направленности вращается вокруг РСН. Такая* реализация равносигнального метода называется коническгш сканированием. При Рис. 11.6. Диаграммы, поясняющие принцип комического ЭТОМ на ВХОДе Прием-сканирования действует сиг- нал (рис. 11.6,6), модулированный по амплитуде с частотой сканирования FcK. Глубина AM зависит от углового отклонения цу, источника излучения от РСН (рис. 11.7), а фаза модуляции - от угла ф,. лежащего в плоскости, перпендикулярной РСН, и заключенного между опорным направлением (ось X) и направлением на проекцию источника излучения на эту плоскость (точка М). Из рис. 11.7 следует 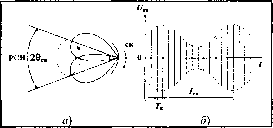 С05(фм) = tg(VM) tg(vi/J Когда ц; ©м, что обеспечивается в режиме автосопровождения, можно считать, что со5(ф)и а/у , а 81п(ф) р /у . Таким образом, азимут а и угол места р источника излучения можно выразить через угол фм путем формирования сигналов, пропорциональных С05(фм) и 81п(ф,). При автоматическом сопровождении цели по направлению положение ДНА радиопеленгатора с коническим сканированием (рис. 11.8) однозначно связано с фазой опорного напряжения Uq , вырабатываемого генератором ГОН: Рис. 11.7. Геометрические соотношения при Vv(0 - н,о *-Os(Qg/- ф) , коническом сканировании ;() jj 51п(П,Г-фо) , где [/ ,0 - амплитуда сигнала ГОН; Q, = 2nF ; ф - вводимая заранее начальная фаза. 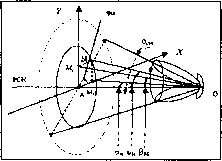
|