
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание При угле рассогласования qO огибающая импульсов на выходе приемника описывается выражением щ(/) = t/ J1 + cos(Q r - ф J] = U + mU , cos(Q ? - Ф J . После детектора сигнала ошибки (ДСО) (пико- ГШПг - ! гоп вого детектора) и полосового усилителя сигнала ошибки (УСО), настроенного на частоту F, сигнал ХС05(П /-ф-фо), где Фо - сдвиг фаз в УСО, для компенсации которого в опорное напряжение вводится фо. Учитывая, что согласно (11.5) w=\/n, и объединяя все постоянные величины в коэффициенте К2, имеем з(0=2¥м COSX Х(ск-Фм-Фо)- Напряжения на выходах фазовых детекторов каналов азимута и угла места пропорциональны разности Рис. П.8. Структурная схема радиопеленгатора с ко- фаз сигнала и опорных на- ническим сканированием (а) и сигналы в ее характер- пряжений (ГОН): ных точках (б) t/ = KmU, со5(ф ) = АГззм( м/м) = м . Таким образом, при вращении ДНА с помощью привода сканирования (ПСк) в каналах азимута и угла места образуются управляющие напряжения и U, значения и полярность которых зависят от угла отклонения цели от РСН в соответствующей плоскости. С помощью этих сигналов приводы антенны ПАа и ПАР поворачивают антенну по углам а и р в положение, когда и р равны нулю.
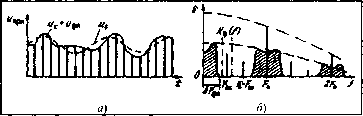 Рис. i i.9. Огибающая (a) и спектр (б) сигаала на выходе приемника Информация об угловом положении цели выделяется из последовательности видеоимпульсов (рис. 11.9, а), модулированных по амплитуде частотой сканирования и флуктуациями ЭПР цели. Спектр этого сигнала содержит компоненты частоты сканирования и спектральные полосы флуктуации амплитуды (рис. 11.9, б). В тракте после детектора стоит настроенный на частоту Fk фильтр. Для однозначной связи с информацией об угловом положении цели и минимума флуктуационных помех в полосе пропускания этого фильтра необходимо, чтобы ДФ <ск<о.5/=;. 11.2. Фазовые радиопеленгаторы Принцип действия фазового радиопеленгатора (РП). Информация о направлении на цель извлекается из фазовых соотношений сигналов, принятых в разных точках пространства. При определении одной угловой координаты, например азимута а, сигналы, принятые антеннами /4 и В (рис. 11.10), разнесенными на расстояние Б, называемое базой, из-за разности хода волн AR = АС имеют разность фаз ф = 2nAR/X. Так как AR = Б51паг, то Ф = 2n(B/A.)sina.
(11.7) Следовательно, информацию об азимуте цели можно получить, измерив разность фаз ф и используя соотношение а = arcsm 2пЕ/Х (11.8) Измерение а по разности фаз ф выполняют с помощью измерителя фазь[ (ИФ) - фазометра на выходе двухканаль-РисН.Ю. Взаимное положение ан- приемника (рис. 11.11). Нелинейная тени и источника излучения в фазо- шкала ИФ проградуирована в значениях вом радиопеленгаторе угла а в соответствии с (11.8).
в фазовых РП могут быть использованы как обычные зеркальные антенны (рис. 11.12,а), так и ФАР (рис. 11.12,6). При пеленгации в одной плоскости ФАР разделяются на две группы излучателей А...Аз и А2...А6, формирующие отдельные диаграммы направленности (рис. 11.12,в). Сама ФАР строится по схеме пространственного оптимального фильтра (или коррелятора). Выходные сигналы U\ и иг ис. ii.il. Структ>рная схема фазового ра-сдвинуты по фазе на угол ф, свя- диопеленгатора занный с направлением на точку излучения сигнала М выражением (11.7). Пеленгация в пространстве выполняется трехканальным РП с базами, повернутыми друг относительно друга на 90°. При необходимости обе базы можно расположить на земной поверхности (рис. 11.13). На этих базах образуются разности фаз Г ф4=2<БуХ)япасхБ3 Ф.=2л?(Б ./Х,)схБасхБр1 (11.9)
1 > i 2 / : \ / : / f . / / . ....... \ W Ё!Нмс5* l!5lH*S ру/гу Пеленги целей в горизонтальной а и вертикальной Р плоскостях определяются из рещения системы уравнений (11.9). Однозначность отсчета угловой координаты. При некоторых значениях угла а и отношения Б/А. фазовый сдвиг сигналов может превысить 360°. В этом слу- Рис. ii.i2. Примеры антенн фазового РП чае из-за цикличности фазы возникает неоднозначность отчета угла а, так как измеритель разности фаз покажет одно и то же значение при а, равном, например, 30 и 390° (т.е. 360+30°). Для обеспечения однознач-
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||