
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание НОСТИ пеленгации в пределах сектора ±90°, когда -l>sina>+l, необходимо, чтобы разность фаз не превышала ±180°. Из (10.7) следует, что условие однозначности выполняется только при БД < 0,5 . Точность фазовых РП. По-Рнс. 11.13. Диаграмма, поясняющая пеленгацию в пространстве фазовым грешноСТЬ измерения угла 0 (равного методом а ИЛИ Р) в соответствии с (11.7) On = а,. 2л-(БД) cose] (11.10) где Од = /: о/л/ ~ погрешность измерителя фазы, зависящая от типа измерителя (коэффициент неоптимальности обработки сигнала в измерителе /:но>0 и от отношения мощностей сигнала и шума q на его входе. При оптимальной обработке сигнала 1 и погрешность по фазе (Т,р =(Е/МоУ, что соответствует обработке сигнала с неизвестной начальной фазой. Тогда погрешность измерения угла а, характеризующая потенциальную точность пеленгации, Оо = (£/Ло) 2я(Б/?.)со5е (11.11) Для повышения точности целесообразно увеличивать отношение Б/Х, что противоречит условию однозначности отсчета угла 0, требующему Б/?.<0,5. Для обеспечения и требуемой точности, и однозначности используют многобазовые РП, у которых самую большую базу выбирают из условия требуемой точности, а наименьшую - из условия однозначности. Следует иметь в виду, что переход от грубой базы к более точной требует выполнения условия сопряжения шкал: погрешность на грубой, но однозначной шкале должна быть меньше диапазона однозначного отсчета на более точной шкале. Поскольку в (11.11) Бсо50=Бэф - эффективное значение базы; = фаэкв, относительное значение пеленгационной погрешности 1/21-1 Для устранения влияния флуктуации амплитуды принимаемых сигналов на точность пеленгации в приемный тракт до фазового детектора включают обычно амплитудные ограничители, которые осуществляют так называемую нормировку сигнала. Как следует из (11.11), погрешность Gq зависит от значения угла 0, и при 9 ->±90° точность пеленгации резко падает. Поэтому целесообразно работать в секторе вблизи перпендикуляра к базе антенн, где cos0 1, а все остальное пространство либо перекрывать с помощью многобазовой системы с базами, образующими многоугольник, либо использовать РП с поворотной базой. Принцип действия следящего фазового РП. Автоматическое сопровождение по направлению в фазовых РП может осуществляться двумя способами. При первом сигнал ощибки с выхода фазового детектора (переключатель на рис. 11.14 в положении /) через схему управления (СУ) (экстраполятор) подается на управляемый фазовращатель, компенсирующий пространственный сдвиг фазы. Измеряемый угол Э (а или (3) отсчитывает-ся по шкале фазовращателя. При переводе переключателя в положение 2 Рис. 11.14. Структурная схема следящего фазового РП реализуется вторая схема следящего РП. В этой схеме функцию интегратора экстраполятора выполняет электродвигатель привода антенны (ПА), который поворачивает антенную платформу до совмещения перпендикуляра к базе с направлением на источник излучения. На рис. 11.15 показана структурная схема следящего фазового РП, реализующего метод скрытого конического сканирования путем Р *- Следящий фазовый РП со скрытым коническим периодического до- Рова полнительного сдвига фаз в одном из каналов приемника на ±п/2. На входе приемника суммируются сигналы, у которых кроме сдвига фаз из-за разности хода сигналов в пространстве (р = -c/sinG периодически (с периодом Гек) добавляется фазовый сдвиг Аф=±я/2. Поэтому, как показано на рис. 1 \Лв,а,б, в зависимости от знака ф или, что то же самое, от 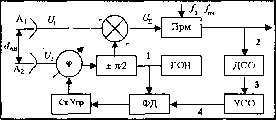 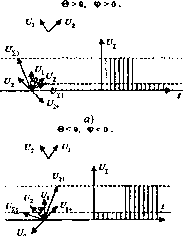 знака Э, на входе приемника образуется амплитудно-модулированный сигнал, фаза огибающей которого зависит от знака ф или 0. Разность фаз сигнала ошибки с выхода УСО и опорного сигнала ГОН служит для определения знака 9. На выходе ФД возникает сигнал разной полярности в соответствии со знаком Э, управляющий через схему управления фазовращателем. 11.3. Многоканальные (моноимпульсные) радиопеленгаторы Многоканальными (моноимпульсными) называют такие РП, в которых информация о направлении на источник излучения извлекается при одновременном сравнении параметров сигналов, на выходе приемных каналов, каждый из которых соединен с соответствующей антенной. При импульсном сигнале такая информация заключена в одном принятом импульсе, чем и объясняется название рассматриваемых РП. По построению моноимпульсные РП Рис. 11.16. Векторные диаграммы (а) для в отличие ОТ РП с коническим случая в>0; для случая в<0 (б); формиро- сканированием, имеющим один ванне огибающей в различных точках РП приемный канал, относятся к РП ( Р *- многоканального типа. Число приемных каналов определяется числом одновременно обрабатываемых сигналов, и при пеленгации в одной плоскости равно двум. Основное достоинство моноимпульсных РП - большая точность, реализуемая ценой увеличения числа приемных каналов. Моноимпульсные РП обычно используются для автоматического сопровождения целей по угловым координатам и состоят из двух основных элементов: углового датчика и углового дискриминатора. Широкое применение получили фазовые и амплитудные угловые датчики, представляющие собой антенные системы, обеспечивающие полученные разности фаз на заданной базе (в фазовом датчике) или равносигнального IrnnuT
|