
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание сутствует, что приводит к повышению точности пеленгации. Этому же способствует большая пеленгационная чувствительность суммарно-разностных моноимпульсных РП, примерно в два раза превышающая аналогичный параметр в РП с коническим сканированием. Отмеченные преимущества моноимпульсных РП привели к широкому распространению этого типа угломерных устройств. Разрешающая способность амплитудных радиопеленгаторов характеризуется соотношениями: 56 9о,5 - метод максимума; Рпс. 11.25. Составляющие погрешностей 56 1,5805 - равносигнальный в одно- и многоканальных следящих метод (точнее 50 2Q,+KQ ). радиог.елепгаторах Величина флуктуационных ошибок радиопеленгаторов обычно оценивается единым соотношением: где /-зависит от типа пеленгатора и аппроксимации ДНА. Так, при /(0)=:ехр{-2,8(0/00 5)}, получаем 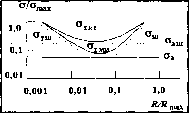
Контрольные вопросы 11.1. Огибающая пачки отраженных от цели импульсов промодулирована по амплитуде функцией, описывающей ДНА: /а(0) = ехр-7г(0/фа) . Ширина ДНА Фа= 6°, угловая скорость вращения антенны С1 - 30° / с, частота повторения импульсов F = 1000Гц, для фиксации максимума используется РП рис. 11.3. Определите весовые коэффициенты, систематическую погрешность измерения, постройте зависимость погрешрюсти пеленгации от отношения сигнал/шум. 11.2. Для пеленгации используется равносигнальный метод, ДНА описывается экспоненциальной функцией (фа= 6°). Постройте ДНА, вычислите пеленгацион-ную способность, определите погрешность пеленгации. 11.3. Какая информация об угловом положении цели и в каких параметрах сигнала содержится на выходе усилителя сигнала ошибки? 11.4. С помощью каких устройств информация об угловом положении цели переводится из полярной системы координат в декартову? 11.5. Какими соображениями руководствуются при выборе частоты сканирования? 11.6. Для пеленгации цели используется фазовый метод, длина волны м. Найдите базу пеленгатора, при которой сектор однозначного измерения аодн-±10°, определите точность измерения угла при 11.7. Производится пеленгация цели, расположенной в пространстве. Базы измерителя расположены в плоскости Земли (база АС расположена в направлении меридиана, база АВ перпендикулярна к ней). Сдвиги фаз принятых сигналов Ф(=85°, ф,4/г= 15°. Определите азимут а иугол местар цели, если с/г/= dAn= 1. 11.8. Какие типы угловых датчиков используются в моноимпульсных радиопеленгаторах? 11.9. Как формируется равносигнальное направление в амплитудных датчиках на ФАР? П.10. Какие типы угловых дискриминаторов используются в моноимпульсиых пеленгаторах? 11.11. Как формируется дискриминационная характеристика в фазово-фазовых, амплитудно-амплитудных радиопеленгаторах? 11.12. Назовите функции преобразователя информации в суммарно-разностных радиопеленгаторах. 11.13. Запишите выражения для потенциальных ошибок фазово-фазовых, амплитудно-амплитудных и суммарно-разностных радиопеленгаторов. 11.14. Укажите недостаток моноимпульсных радиопеленгаторов. 11.15. Перечислите основные составляющие погрешности одно- и многоканальных радиопеленгаторов? Глава 12. Измерители высоты Высота объекта над поверхностью (Земли) может измеряться радиовысотомером автономно с борта объекта либо с поверхности радиолокационным измерителем. В первом случае применяют частотный или импульсный радиодальномер с ДНА, ориентированной в направлении вертикали к поверхности Земли (или отклоненной от вертикали на известный угол). Во втором случае применяют специальный радиолокатор. При высоте h подъема антенны этого радиолокатора над поверхностью Земли, расстоянии до цели R и угле визирования цели в вертикальной плоскости р истинная высота цели Н может быть определена, как показано в п. 5. L2 и на рис. 5.11, из соотношения Н=Н +Н+КУК,,, (12.1) где Н р=К51ф - приведенная высота. Последнее слагаемое учитывает кривизну земной поверхности и рефракцию радиоволн в стандартной атмосфере с помощью введения эффективного радиуса Земли эф- Из этого соотношения следует, что задачей радиолокационного измерителя высоты является нахождение угла места цели р. Зная этот угол и измерив дальность R соответствующим методом, можем по известным h и /?з.эф найти высоту цели Я. Применяют и более простой метод непосредственного измерения: И- метод V-образного луча. Методы измерения угла места цели Р основаны на использовании остронаправленных в вертикальной плоскости антенн, формирующих как сканирующие, так и неподвижные ДНА. При сканирующей (качающейся) в вертикальной плоскости антенне можно измерить р методом максимума. Если сканирование производится с помощью механического привода, то снижается темп портупления информации и вычисления Н, что при большом числе быстро перемещающихся целей является существенным недостатком. Этот недостаток не проявляется в радиолокаторах с многолепестковой ДНА в вертикальной плоскости, т.е. с параллельным обзором по углу места и одновременным измерением высоты целей по каждому из лепестков ДНА. В таком радиолокаторе зондирующий сигнал излучается всеми, парциальными лепестками ДНА одновременно, а сумма лепестков образует широкую (формы cosec р) ДНА. При приеме отраженных сигналов каждый лепесток ДНА работает на отдельный приемный канал. Быстродействие такого радиолокатора достигается ценой усложнения системы обработки сигналов.
|