
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание в обзорных радиолокаторах, предназначенных для определения трех координат целей, возможна комбинированная система измерения, при которой медленное механическое или электрическое вращение ДНА по азимуту сочетается с быстрым сканированием по углу места. В таком радиолокаторе для перемещения луча в вертикальной плоскости изменяют несущую частоту зондирующего сигнала (частотное сканирование), а в качестве антенны применяют ФАР. Зависимость фазового набега сигнала в волноводных линиях передачи от частоты приводит к отклонению луча ФАР. Частота может изменяться дискретно от импульса к импульсу или плавно. При фиксированной несущей для управления положением луча в вертикальной плоскости можно использовать лучеобразующую волноводную матрицу. Она состоит из системы отводов от волноводов, соединенных с излучателями ФАР. Линии, проведенные по точкам подключения отводов, наклонены к этим волноводам под углами, пропорциональными ожидаемым углам наклона фронта волны, падающей на ФАР. Выбирая соответствующую линию отвода, обеспечивают прием только того сигнала, который приходит с определенного направления (поворачивают ДНА), и находят таким образом угол Р, а затем рассчитывают высоту цели Н. Принцип действия измерителя высоты, основанного на методе V-образного луча. Антенная система радиолокатора, расположенного в точке О (рис. 12.1), имеет два луча: вертикальный (Лв) и наклонный (Л ). Плоскость последнего составляет с плоскостью Лв угол 45°. Ширину лучей в азимутальной плоскости (обычно несколько градусов) выбирают из требуемого разрешения целей по азимуту. Для ослабления зависимости мощности принимаемого сигнала от дальности обращенная в верхнюю полусферу часть ДНА обоих лучей по напряженности поля должна изменяться по закону cosec 9, где 9 - угол в плоскости луча, отсчитываемый от линии Рис. 12.1. Взаимное положение лучей при использовании мето- пересечения лучеи. да V-образного луча (а) и их проекция на вертикальную плос- Напомним, кость, перпендикулярную оси Аи содержащую цель {б) что подобная фор- ма ДНА используется в радиолокаторах обзора земной поверхности с той только разницей, что по закону cosec 9 изменяется не верхняя, а нижняя часть ДНА. Оба луча неподвижны друг относительно друга и вместе вращаются во- 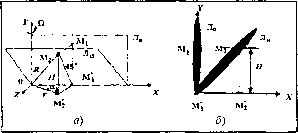 круг вертикальной оси с угловой скоростью сканирования О. для обзора воздушного пространства. При врашении антенны луч Л проходит через цель, находящуюся в точке М. Положение этой точки характеризуется дальностью R, высотой Япр и горизонтальной дальностью г. Обозначим проекцию точки Mi на плоскость луча Лв через М2. Опуская перпендикуляр на линию пересечения лучей (ось ОХ), получаем точку М2. Четырехугольник MM2M2Mi - квадрат, так как его диагональ М1М2 наклонена к сторонам под углом 45°, равным углу между плоскостями лучей Лв и Л . Из треугольников МОМ и М20М находим где ад - разность азимутов отметок цели при пересечении ее плоскостями лучей Лв и Л, зависящая от Н р. Решая совместно эти два уравнения, получаем И ,=Ё. (12.2) V+sin ад Отсюда следует, что, измерив r и ад, можно определить приведенную высоту Нщз, а следовательно, и истинную высоту я. Для таких измерений часто пользуются индикатором дальность - азимут . Однако при малой Япр из-за конечной ширины Лв и Л отметки цели, полученные по этим лучам, перекрываются и отсчет угла ад затрудняется. Устранить этот недостаток можно, развернув Л относительно Лв на угол ао в горизонтальной плоскости. Тогда соотношение для определения Япр примет вид /?sin(ao-f ад) /sinap пр= / - -/ . , (2-3) л/1+sin (ао + ад) yj\ + sm щ Точность определения высоты зависит от погрешности Оа отсчета угла ад: где и СКП при пеленгации по наклонному и вертикальному лучам. Так как а,=о-., sec 45° = О- 72, имеем <а = >/з и о-, = y/SRrCr . (12.4) Вид РЛС с V-образным лучем показан на рис. 12.2.  Рис. 12.2. РЛС с V-образной ДНА Контрольные вопросы 12.1. Назовите методы измерения высоты объекта над поверхностью Земли. 12.2. Как связаны истинная и приведенная высоты цели? 12.3. Какие координаты необходимо измерить для определения истинной высоты цели? 12.4. Для чего разворачивают наклонный луч относительно вертикального в горизонтальной плоскости? 12.5. Поясните принцип действия измерителя с V-образным лучом.
|