
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание Глава 13. Измерители скорости цели Одним из важных параметров движения, подлежащих определению в радиосистемах, является скорост. При однопозиционном расположении радиосистемы (рис. I3.I, а) можно измерить радиальную составляющую скорости движения Vr=R и угловую скорость перемещения объекта 6, связанную с тангенциальной составляющей скорости V=RQ. В многопозиционной радиосистеме можно вычислить вектор скорости в пространстве по трем его составляющим (радиальным скоростям), измеренным на трех разнесенных позициях или вектор скорости на плоскости при двух разнесенных позициях (точки 01 и (92 на рис. 13.1,6), Для этого надо знать угловые положения линий визирования цели (например, углы а\ и а2 на рис. 13,1). Радиальную скорость цели можно найти либо дифференцированием данных о текущей дальности цели:
либо измерением ДОПЛе- Рис-13.1. Составляющие вектора скорости, определяемые в одно (а) и двухпозиционной (б) системе ровского смещения час- тоты принимаемого сигнала Уд при движении цели. При использовании метода дифференцирования дальности данные о скорости обычно извлекают из входного сигнала последнего интефатора в экстраполяторе автоматического радиодальномера. Оптимальным при определении скорости по доплеровскому сдвигу частоты является, как следует из форму- Рис. 13.2. Структурная схема измерителя радиаль-ЛЫ для потенциальной точно- ной скорости пассивного объекта сти измерения частоты (9.22), непрерывный сигнал, имеющий наиболь- 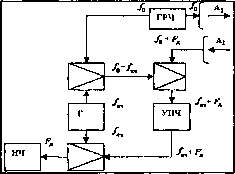 шее значение среднеквадратической длительности сигнала /ск- Реализуемая при этом точность превышает достижимую при методе дифференцирования, так как последняя зависит от точности измерения дальности и ухудшается из-за дополнительной обработки при выделении продифференцированного сигнала. Принцип действия доплеровского измерителя радиальной скорости иллюстрируется структурной схемой рис. 13.2. При определении скорости пассивного объекта цель облучается непрерывным когерентным сигналом частоты /о, который вырабатывается ГРЧ, и измеряется доплеровский сдвиг частоты -2VJX. Отраженный от объекта сигнал с частотой Уо+/д во втором смесителе приемника переводится на частоту подставки /пд>/1тах ДЛЯ обеспечения однозначного измерения в ИЧ как положительных, так и отрицательных доплеровских сдвигов частоты. Потенциальная точность определения скорости в рассматриваемом измерителе характеризуется погрешностью (см. гл. 3 и 9) cj, = {X!2){{EIN,fh,y. (13.1) Если определяется скорость активного объекта, ГРЧ которого работает в непрерывном режиме на частоте f\ (рис. 13.3), то в пункте измерения принимается сигнал с частотой f\+F, где Колебания после преобразования на промежуточную частоту и усиления в УПЧ переводятся в балансном модуляторе на частоту подставки Fпд, и в ИЧ измеряются значение и полярность доплеровского смещения F сигнала цели. Преимущество этого, так называемого беззапросного варианта построения измерительной системы, - неограниченная пропускная способность, т.е. возможность работы одновременно со многими пунктами измерения. Однако этот метод требует высокой долговременной (на все время функционирования системы) стабильности частоты ГРЧ на объекте и гетеродинов в пунктах измерения. Потенциальная точность такого измерителя определяется выражением (13.1), в котор5ом вместо К/2 следует использовать К. Рис. 13.3. Структурная схема беззапросного измерителя радиальной скорости активного объекта На рис. 13.4 показана структура измерительной системы, состоящей из запросчика и ответчика. Запросный сигнал, излучаемый на частоте /, приходит на ответчик с доплеровским сдвигом /д= -{V/c)fi и через устройство развязки приемного и передающего каналов УР попадает на смеситель приемника. Поскольку гетеродинный сигнал, формируемый умножителем частоты, имеет частоту mf, в УПЧ сигнал усиливается на частоте fm-f&F - mf- После дробно-кратного преобразования частоты с помощью, например, регенеративных делителей, частота сигнала принимает значение {n/m)(J\+ Fj-mf. После второго преобразования частоты формируется несущая частота ответного сигнал а/2= {n/m)(fi+F). -7.- 2(h/>u)F +F
Рис. 13.4. Структурная схема запросчика (а) и ответчика (б) измерителя радиальной скорости активного объекта Принимаемый запросчиком ответный сигнал с частотой MF,*=(n/mY,[lHVr/c)][lHVr/c)]{f+2F,){n/m) через устройство развязки УР и смеситель подается на УПЧ с частотой /l+Fд -/р Опорный сигнал, имеющий частоту {n/ni]f\-f, формируется из сигнала ГРЧ с помощью дробно-кратного преобразователя частоты и смесителя. После добавления частоты подставки Fпд на последний смеситель приходит опорный когерентный сигнал с частотой {n/mYx-f-Fy. Таким образом, измеритель частоты (ИЧ) определяет частоту F a+2F {n/m). Потенциальную точность измерения скорости в данной системе находят с помощью формулы (13.1). Преимуществом запросного метода работы являются меньшие требования к стабильности частоты в системе запросчик-ответчик, которая должна быть высокой только на малых интервалах времени, равных tii,nax=2Rmax/c: Однако на борту объекта устанавливается аппаратура, имеющая, как правило, большие массу и объем, чем при беззапросном
|
||||||||||||||||||||||||||||||||||||||||