
|
| |
|
Главная
>
Радиолокация - обнаружение и распознавание 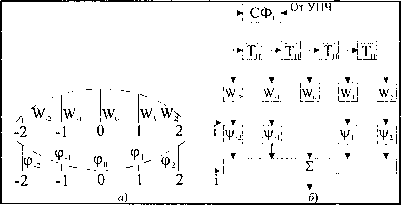 Рнс. 14.10. Коэффициенты усиления и фазовые сдвиги в фазовращателях (а); структура устройства оптимальной обработки сигнала в РЛ с СА (о) Увеличение разрешающей способности 5/ в тангенциальном направлении наталкивается на такие ограничения, как траекторные и аппаратурные дестабилизирующие факторы, которые приводят к отклонению фазы траекторного сигнала от квадратической аппроксимации. Фазовое рассогласование определяется отличиями принятой модели 7?а(0 и реальной траектории Rj{t) (14.9) 4я 4я Аф(0 = уА/? = у Неравенство (14.9), определяет допустимые погрешности при фокусированной обработке и размеры синтезированной апертуры. На рис. 14.11 представлены зависимости аппроксимирующей /?а(0 и на- Ри* Зависимости аппроксимирующей и наклонной КЛОННОЙ R (t) дально- тей как функции смещения ЛА по траектории или , времени стен как функции смещения ЛА по траектории L= Vt или времени Подставляя в (14.9) значения дальностей, выраженные через параметры V, Rq траектории ЛА, и учитывая предельно допустимое значение А/?=Х/8 и размеры Lc = УТ синтезированной апертуры антенны, приходим к уравнению
AR = RAO-KiO =Ro+--n/V + Ll< V8. (14.10) Решение уравнения (14.10) ограничивает размеры IL синтезированной апертуры: 2L, = ylRo(4 + X) 4R, 74/?о1, ф . (14.11) Здесь учтено значение синтезированной апертуры при нефокусированной обработке, для которой допустимая фазовая погрешность определяется значением Аг (рис. 14.11): с ф = >/- (14.12) Тангенциальная разрешающая способность, реализуемая РЛС с СА, SL = 5Q = R,. С учетом выражения (14.12), находим тангенциальную разрешающую способность при фокусированной обработке с квадратической аппроксимацией наклонной дальности: XRq XRq 5V = 4R + X lyJRo 14.2. Цифровая обработка сигналов РСА При аналоговой обработке в РСА с использованием фотопленки информация извлекается с большим запаздыванием относительно момента записи. Цифровая обработка сигналов в РСА позволяет получать картографическую информацию в реальном масштабе времени, если обеспечиваются требуемые быстродействие и объем памяти специализированного вычислителя (процессора). Структурная схема устройства цифровой обработки сигналов РСА. С помощью АЦП (рис. 14.12) сигналы фазовых детекторов двух квадратурных каналов преобразуются в цифровой код и подаются в ОЗУ, состоящие из 1, азимутальных каналов и п каналов дальности. Кодированные сигналы в каждый период повторения записываются в соответствующий азимутальный канал, имеющий п ячеек дальности (см. рис. 14.7). Поэтому в каждой ячейке дальности содержится информация о сигнале, отраженном от цели, находящейся на данном расстоянии и наблюдаемой под определенным азимутальным углом к направлению полета. Содержимое ОЗУ считывается с некоторой задержкой относительно момента записи. При этом в каждом периоде повторения сигнал снимается поочередно с каждого из каналов дальности, образованного определенными ячейками дальности азимутальных каналов. Такой сигнал содержит информацию об изменении отраженного сигнала от цели на дальности R при движении ЛА на интервале синтезирования эф. Сигналы с ОЗУ обрабатываются процессором (П), реализующим алгоритм (14.7) при фокусированной обработке или (14.8) при нефокусиро-ванной. Весовые коэффициенты W, и фазовые сдвиги ф, вводит вычислитель опорной функции ВОФ, который вырабатывает сигнал, представляющий собой аналог импульсной переходной характеристики H{i). : }воФ ОЗУ1 ОЗУ2 ]/< [ ВОФ Рнс. 14.12. Структурная схема устройства цифровой обработки сигналов РСА Устройства фокусированной обработки. Фокусированная обработка требует умножения сигнала каждого канала дальности на зависящую от дальности функцию H{Rq). Для этого с помощью вычислителя опорной функции ВОФ формируется сигнал, описываемый выражением (14.7), который перемножается с сигналом ОЗУ. После умножения производится суммирование сигналов с данной дальности по всем азимутальным ячейкам, в результате чего образуются сигналы Xj и Y соответствующие корреляционным интегралам квадратурных каналов. Выходной сигнал процессора представляет собой корень квадратный из суммы квадратов Xj: и Yz- Компенсирующий сдвиг фазы v; (14.7) можно ввести, изменив ортогональные проекции вектора сигнала. Это достигается изменением составляющих сигнала в квадратурных каналах. В самом деле, если нужно ввести фазовую поправку а вектор сигнала Ui имеет квадратурные составляющие А, =f/, со5ф, и У, =U , sirup то новый фазовый угол, очевидно, будет ф/+1 = ф/+ v;, или ф2= <Pi + v/. При этом квадратурные составляющие вычисляют по формулам Х2 = t/ , со5(ф, + \/) = и, COS ф COS \/ -sin ф sin \/ = А, COS \/ - sin \/,
|
||||||||||||||||||||||||||||||