
|
| |
|
Главная
>
Технологичность сварных конструкций Условные изображения и цифровые обозначения вариантов сборки первой стхпени относительно второй червячных и цилиндри- ческо-червячных двухступенчатых редукторов и мотор-редукторов должны соответствовать приведенным в табл. 5. 5. Варианты сборки первой ступени относительно второй червячных и цилиндрическо-червячных двухступенчатых редукторов и мотор-редукторов Сборка первой ступени редуктора относительно второй червячного двухступенчатого цидиндрическо-червячного       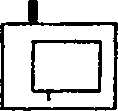  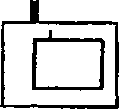 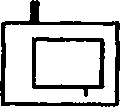 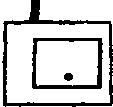 Примечания: 1. Вариант сборки редуктора и мотор-редуктора следует рассматривать в Проекции на горизонтальную плоскость, которой пардтлельны выходной вал второй ступени и входной ват первой ступени двухст\пенчатого червячного редуктора, а входной вал первой ступени цидиндрическо-червячного редуктора перпендикулярен этой плоскости. 2 Буквами А и Я обозначены соответственно первая и вторая ступень редуктора. ОБЩИЕ СВЕДЕНИЯ ВАРИАНТЫ СБОРКИ  в табл, 4 и 5 приняты следующие обозначения концов ватов: - - конец входного вата; - конец выходного вала; - конец входного вала, направленный вверх по отношению к наблюдателю: - конец входного вала, направленный вниз по отношению к наблюдателю. На изображении варианта сборки мотор-редукторов допускается дополнительное упрошенное изображение контура двигателя (рис. 2). ТИПЫ РЕДУКТОРОВ И МОТОР-РЕДУКТОРОВ. ГЛАВНЫЙ ПАРАМЕТР Чаше всего применяют цилиндрические редукторы, имеющие высокие нагрузочную способность и КПД: одноступенчатые, двухступенчатые разверн>той, раздвоенной и соосной схем. трехступенчатые развернутой и раздвоенной схем. Соосный редуктор может иметь тихоходную ступень с внутренним зацеплением. Если компоновка машины требует ортогонального расположения входного и выходного валов, применяют конические или коническо-цилиндринеские двухступенчатые и трехстттен-чатые редукторы. При соосном расположении исполнительного органа и двигателя рационатьны гьгане-тарные и волновые редукторы, которые могут обеспечивать высокие ресурс и передаточное отношение при низком уровне шу.ма. Редукторы, в которых использованы червячные передачи, - червячные цилиндрические, глобоидные. червячно-щшшдрические и ци/гинд-ринеско-нервячные - могут обеспечивать высокое передаточное число при низком уровне шума, но имеют низкие КПД и ресурс. Оси ватов .могут зани.мать разное положение в пространстве. Если, например, нужно обеспечить наименьшую плошадь в плане, их располагают в вертикальной плоскости, Цля некоторых механизмов нужны редукторы с вертикальным расположением оси выходного вала. В этом случае удобны редукторы с ко-нически,\ш и червячны.ми передачами, так как ось двигателя остается горизонтальной. В редукторах обикпрохЕыш.зенного ири-\[снени>[ !1редусмотреиа возможность варьи-роиа Iь ноложешЕс выход[[Ых налои, при ло\[ Рис. 2 в одном и том же корпусе подбором зубчаты пар в широком диапазоне можно получат различные передаточные числа. Конструктив ные варианты, осушестатяемые без изменени: корпуса, называют исполнениями редуктора. Мотор-редукторы могут быть выполнень на базе всех приведенных схем, но чаще ис пользуют редукторы соосных схем, конструк тивно объединяя их с двигателями в вид< однокорпусного или брючного исполнения. В пер вом случае редуктор и статор двигателе встраиваемого исполнения размешают в од ном корпусе. Во втором - двигатель с наса женной непосредственно на конец вала шее терней крепят на редукторе с помощью фланца; возможно фланцевое крепление двигател5 на редукторе и соединение концов вало1 муфтой. Получили распространение навесные редукторы и мотор-редукторы. Их выходной ва; выполнен полым со шлицевым отверстие\ иди с пазом под шпонку. Такой вал соединяют непосредственно с входным валом приводимого в движение механизма. Исполнительные электромеханизмы представляют собой самостоятельные конструктивно независи.мые механизмы, состоящие и: электродвигателя и редуктора, в конструкции которых дополнительно включены элементы путевой авто.матики (датчики положения, командоаппараты) и предохранительные муфты. В зависимости от конструкции редукторог выходной вал может иметь врашательное (поворотное) или поступательное движение. Исполнительные электромеханизмы при.меняют .для приводов регуляторов систем автоматического управления (включая приводы арматуры). В робототехнике, технологиче-ско.м .машиностроительном оборудовании, других отраслях машиностроения используют электро.механизмы в виде модулей врашения. поворота или линейного пере.мешения. Важнейший характеристический размер, в основном определяюший нагрузочную способность, габариты, массу редуктора называют главным параметром редуктора. Главньи1 параметр цилиндрических, червячных и глобо- идных редукторов - .мсжосепос расстояние гихоходной ступени, нланечарных - радиус / полила, к<1НИичкп\ помина п.Н1.1Й нпеншии делительный диаметр dj колеса, волновых -внутренний диаметр di гибкого колеса. Главным параметром мотор-редуктора является главный параметр тихоходной ступени его редукторной части. Реальный диапазон передаточных отношений (чисел) редукторов - от 1 до 1000. Значения передаточных отношений должны соответствовать ряду Л20 предпочтительных чисел (ГОСТ 8032-84). ЗАЦЕПЛЕНИЕ ПЕРЕДАЧ Зацепление цилиндрических передач эвольвеитное. реже - зацепление Новикова, которое, в частности, рационально азя шевронных передач. Л-зительно работающих с .чгало-меняющейся нагрузкой. В зависимости от степени точности передач редукторы исполняют двух категорий точности - 1 и 2. Степень точности передач должна быть не ниже указанной в табл. 6. 6. Степени точности передач редукторов
Нормы кинематической точности эволь-вентных непланетарных передач, к которым не предъявляют повышенные требования по шуму. мог>т быть на одну степень грубее норм плавности. В цилиндрических передачах с зубьями высокой твердости лля уменьшения неравномерности распределения нагрузки по ширине венца используют продольн\ло модификацию шестерни (бочкообразность). В этом случае требования к пятну контакта устанавливают индивидуатьно. Точность планетарных передач по нормам кинематической точности должна Ьъпъ не грубее норм плавности. Конические передачи изготовляют с исходным контуро.м по ГОСТ 16202-81 и круговым tvOoM. Червячные цилиндрические передачи в большинстве случаев изготовляют с эволь-вентным червяком Zl или с вогнутым профилем червяка который шлифуют торооб-разным кругом. Параметр Ra шероховатости по ГОСТ 2789 рабочих поверхностей - до.лжен быть не более: 0.63 mk.m - витков ццтиндрических червяков; 1.25 мкм - зубьев зубчатых колес внешнего зацепления с модулем < 5 мм и витков глобоидных червяков; 2.5 мкм - зубьев эвольвентных колес с модулем более 5 мм и шестерен с модулем менее 5 м.м. выполненных заодно с ватом и имеющих диаметр впадины зубьев мсньенс диаметра 11ИЛОМ расположенных шеек; iy6boii колес |
||||||||||||||||||||||||||||||