
|
| |
|
Главная
>
Современные системы связи Нелинейные элементы подразделяют на управляемые и неуправляемые. К первым относятся многоэлектродные приборы, имеющие раздельные вход и выход (транзисторы, сеточные электронные или ионные приборы), поскольку в них можно управлять выходной характеристикой изменением входного воздействия. Неуправляемыми являются двухэлектродные приборы (диоды). Если из1вестна некоторая (прямая) зависимость у=Ф{х), то зависимость x=tf{y) называют обратной. Так, прямой характеристике y=smx соответствует обратная л:=агсзш г/Ч Приборы, имеющие падающие участки на вольт-амперных характеристиках, где производные dildu<iO или dujdKQ, называют приборами с отрицательным сопротивлением. В зависимости от того, какую букву напоминает форма характеристики прибора, различают два типа отрицательных сопротивлений: сопротивления Л-типа, вид вольт-амперной характеристики которых сходен с приведенной на рис. 2.16; они же называются отрицательными сопротивлениями, управляемыми напряжением, поскольку именно напряжение однозначно определяет режим их работы; сопротивления S-Tuna, вольт-амперные характеристики которых соответствуют рис. 2.1е; они же называются отрицательными сопротивлениями, управляемыми током, так как их режим однозначно определяется протекающим через прибор током. Если на рис. 2.1е поменять местами координатные оси, то характеристика этого прибора примет Л-образный вид. Дифференциальные сопротивления du/di элементов обоих типов являются отрицательными на участках PQ и положительными за их пределами. Приборами Л-типа являются туннельные диоды, диоды Ганна, лампы при наличии в них динатрон-ного эффекта; приборами 5-типа - некоторые ионные (газотроны, неоновые лампы) и полупроводниковые (динистры, тиристоры, ла-винно-пролетные диоды) приборы. Для расчета схем с нелинейными элементами применяются графические, аналитические и машинные методы. Достоинством графических методов является возможность наглядного определения токов и напряжений в схеме при заданных ее параметрах. Однако графическое решение не позволяет установить аналитические зависимости между изменением параметров устройства и величинами его токов и напряжений, определить оптимальные значения параметров и т. п. Аналитические методы обеспечивают установление таких зависимостей, и в этом их главное достоинство. При анализе сложных схем особенно с высокой точностью аналитические решения оказываются или очень громоздкими, или практически невозможными. Тогда применяют машинные методы исследования. Определим графически (рис. 2.2) ток, протекающий через резистивный нелинейный элемент, под действием напряжения u=Uo-\-U cos at. (2.1) Пример перехода от обратной характеристики к прямой приведен в § 5.5. Используемый для этого метод проекций состоит в следующем: на графике u{t) замечаем величины и в различные моменты /, затем по вольт-амперной характеристике находим соответствующие значения тока i и откладываем их па плоскости i, t. Огибающая последних дает зависимость [{t). Построение удобно начинать с
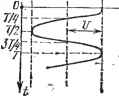 Phc. 2.2 определения тока в моменты, соответствующие максимальному, минимальному и среднему значениям напряжения (i = 0, t2=T/4, <3=jr/2, ti=STIi, /5=Г), и лишь затем находить промежуточные значения тока. При воздействии гармонического сигнала (2.1) ток оказывается периодической функцией той же частоты со, но иной формы. Постоянная составляющая напряжения Uo, называемая смещением, определяет положение рабочей точки А на характеристике. нелинейного элемента. Из рис. 2.2 следует: 1) если входное напряжение является четной функцией времени, то ток через нелинейный резистивный элемент также является четной функцией времени той же частоты и потому его разложение в ряд Фурье имеет вид ( (if) =ro-f Л cosoD-f/2соз2о>+/зсо5 Зсо-Ь...; (2.2) 2) Первая гармоника тока находится в фазе с приложенным напряжением; 3) постоянная составляющая тока /о зависит и от смещения Uo и от амплитуды U входного напряжения. В общем случае ток о отличается от тока /о, соответствующего рабочей точке. Так, для рассматриваемой на рис. 2.2 вольт-амперной характеристики, Это имеет место только при безгистерезисных характеристиках нелинейного элемента. При наличии гистерезиса первая гармоника отклика сдвигается по фазе относительно входного сигнала (2.1), как показано ниже при объяснении рис. 2.15. крутизна которой возрастает с увеличением напряжения и, постоянная составляющая тока /о больше тока /о в рабочей точке, причем при увеличении U /о возрастает. Величина /о соответствует уровню, при котором заштрихованные на рис. 2.2 площади, расположенные выше и ниже этого уровня, оказываются равными. Зависимость постоянной составляющей тока /о от амплитуды переменного напряжения является важной особенностью нелинейных элементов, на использовании которой основана работа выпрямителей, детекторов, разнообразных измерительных приборов. . 2.2. АППРОКСИМАЦИЯ ВОЛЬТ-АМПЕРНЫХ ХАРАКТЕРИСТИК Общие сведения. Математическое описание работы схемы начинается с составления уравнений, связывающих токи и напряжения в различных частях схемы, в том числе и в нелинейных элементах. Для нелинейных элементов обычно известна графическая зависимость тока от напряжения (из справочника или эксперимента). Поэтому возникает задача аппроксимации, т. е. приблиокен-ного аналитического представления нелинейной характеристики. Наиболее широкое распространение имеют аппроксимации полиномиальная, кусочио-линейная, а также с помощью некоторых трансцендентных функций (экспоиенциальнкх, тригонометрических и др.). Обычно при выборе способа аппроксимации стремятся удовлетворить требованиям, являющимся в значительной степени противоречивыми: возможности выявления свойств схемы, представляющих интерес в рассматриваемом случае. Например, для объяснения различных особенностей работы автргенератора требуется аппроксимировать характеристику нелинейного элемента полиномами то первой, то третьей, а то и пятой степени; простоты аппроксимирующей функции, допускающей последующую математическую обработку; достаточной точности. Необходимость определенной точности аппроксимации очевидна, ибо без нее нельзя гарантировать достаточную точность расчетов всего устройства. Однако увеличение точности аппроксимации достигается, как правило, ценой усложнения аппроксимации, что противоречит второму, а иногда и первому требованиям. Кроме того, характеристики и параметры реальных приборов (транзисторов, ламп) обладают значительным разбросом и потому во многих случаях качественно правильная аппроксимация имеет большее значение, чем точность. В других случаях, например при расчетах на ЭВМ сложных устройств микроэлектроники, содержащих сотни и тысячи элементов и не имеющих органов регулировки, вопрос о точности аппроксимации характеристик элементов приобретает первостепенное значение. Величина допустимой неточности аппроксимации может оцениваться различными критериями приближения. Наибольшее распространение имеют: I) среднеквадратическое приближение, при котором требуют, чтобы среднее значение квадрата отклонения аппроксимирующей зависимости =Ф(н) от действительной i=<S>(u) не превышало некоторой допустимой величины б [ф(гг)-<D(u)]2due в интервале hV=U2-U\ значений и, в пределах которого производится аппрач-симация; 2) равномерное приближение, при котором требуют, чтобы при любом значении и интервала ДУ величине отклонения Ф(н) от Ф(н) не превышала 6, т. е. Ф(н)-Ф(ы) 1<б.
|
||||||||||||||||||||