
|
| |
|
Главная
>
Современные системы связи Под АЧХ синхронизированного генератора обычно понимают зависимость квадрата относительной амплитуды колебЯ и у от величины X, пропорциональной расстройке До; а под ф з висимость ф(х). Уравнение (5.37) является кубическиь/ относительно у и квадратным относительно х. Поэтому удобк сначала рассчитать х{у), преобразовав (5.37) к виду х== -{\-у)К а затем построить обратную характеристику у{х), поме] J ми оси координат. На рис. 5.8а построены зависимосгЬ двух значений F (большого и малого Fz) и {\-y)j г о М, Ni, N2 и iVs пересечения характеристик х=0. На ри*- О строены зависимости х{у) для обоих значений F с у1етом того, что х2>0. Извлекая квадратный корень из ординат эт зависимостей и меняя местами координатные оси, получаем частотные характеристики рис. 5.9.
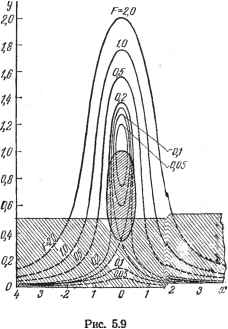 Рис. 5.8 Частотные характеристики генератора при сильны/ внешних сигналах сходны с частотными характеристиками од1:>°° ЯГ лебательного контура. При малых значениях F они #еют иной вид и оказываются неоднозначными: одному значени} соответствуют три значения у. Амплитуда Л и фаза tp стацио>Р Ь1х колебаний синхронизированного генератора определяют* общем случае из уравнений Ф(Л, ф) = 0 и Ч(Л, ф) =0. >о. Для исследования устойчивости стационарных режимов нужно предположить, что произошли небольшие отклонения амплитуды и фазы колебаний от стационарных значений Л и <р, подставить Л+ЛЛ и ф+Дф в (5.29), разложить их правые части по степеням ДЛ и Дф и ограничиться величинами первого порядка малости аналогично тому, как это было сделано при выводе (4.74). В результате получим уравнение вариаций, применяя к которому критерий Рауса-Гурвица приходим к условиям устойчивости -[Фл{а, <р)+¥(а. ф)]>0. Фа (А, ф) Фф(Л. ф) i (5-39) ¥а(А, ф) %ха, Ф) Здесь Фа, а, Фф и W,f - частные производные функций Ф(Л, ф) и W(A, ф) соответственно по Л и <p при стационарных значениях Л и ф. Для рассматриваемого конкретного случая (5.34) условия устойчивости (5.39) оказываются д:>0,5 п + (у-1) (Зг/-1)>0. На рис. 5.9 области неустойчивых, т. е. нереализуемых, решений заштрихованы. Их границами являются горизонтальная линия, проведенная на уровне х=0,5, и эллипс + + {у-1){3у-1)=0 с центром в точке х=0, /=2/3 и вертикальной полуосью, равной 1/3. Можно показать, что в точках этого эллипса касательные к частотным характеристикам у(х) вертикальны. 5.5. СИНХРОНИЗАЦИЯ КОЛЕБАНИИ ГЕНЕРАТОРА Синхронизация (на основной частоте) или захватывание частоты имеет место тогда, когда на автогенератор, работающий на частоте оо, воздействует внешний сигнал с частотой о, близкой к (Оо. Синхронизация заключается в изменении частоты колебаний генератора, в результате которого она становится равной частоте внешнего воздействия. Синхронизация колебаний широко используется в разнообразных радиотехнических, связных и измерительных устройствах: для стабилизации частоты автогенераторов, усиления ЧМ колебаний и т. п. Без синхронизации невозможна работа осциллографов. Синхронизация свойственна всем автогенераторам и имеет место в некоторой полосе частот (2Дсй)с, называемой полосой синхронизации, или полосой захватывания. За пределами полосы синхронизации в генераторе одновременно существуют автоколебания частоты генератора <ог и вынужденные колебания частоты ы; в результате образуются биения с частотой Й=сй-(йг. (5.40) На рис. 5.10 показана зависимость частоты колебаний генератора, от частоты воздействующего сигнала: внутри полосы синхронизации о)г= и S = 0. На рис. 5.9 были приведены амплитудно-частотные характеристики синхронизированного генератора на приборе с отрицательным сопротивлением. Характеристики транзисторных и ламповых синхронизированных генераторов в основном аналогичны. > Эопт 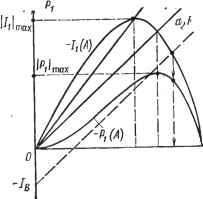 Рис. 5.10 Рис. 5.11 Важнейшей характеристикой синхронизированного генератора является полоса синхронизации. При малых F можно считать, что частотные характеристики пересекаются с эллипсом неустойчивости при у==1 (см. рис. 5.9). Подставляя это значение в (5.37), получаем (xi)max=F- Отсюда С учстом (5.36) относительная полоса синхронизации П= (2Лс )с/о)о=-БвМо. При больших F на границах полосы синхронизации г/=0,5 и из (5.37) (x2i),na =2-0,25. Поэтому при 2f>0,25 УТвМо. Следовательно, полоса синхронизации возрастает с увеличением амплитуды синхронизирующего сигнала и с уменьшением амплитуды Ао собственных колебаний автогенератора. Величиной же Ао можно управлять изменением обратной связи и режима работы генератора: чем меньше обратная связь превосходит необходимую для самовозбуждения, тем больше полоса синхронизации. В синхронизированном генераторе устанавливается определенный сдвиг фаз ф между синхронизирующим сигналом и напряжением на контуре автогенератора, определяемый выражением (5.38) и зависящий от расстройки Д(й=сй-оо- При малых if на границах полосы синхронизации у7а\ и фж ±90°. При анализе синхронизированных генераторов СВЧ диапазона важное значение имеют частотные характеристики мощности (ЧХМ) первой гармоники \Pi{x)\, отдаваемой НЭ. На рис. 5.11 построены колебательная характеристика -1\{А) и зависимость -Pi (Л), рассчитанные для НЭ (5.34) по выражениям При амплитудах А <Лгр=l/Oi/Saa мощность Pi=0,5/iA<0; это означает, что НЭ отдает эту мощность.
|
|||||||||||||||||||||||||||||||