
|
| |
|
Главная
>
Современные системы связи МНОГОЗНАЧНОСТЬ ФАЗЫ ВЫХОДНОГО КОЛЕБАНИЯ Деление частоты заключается в создании выходного колебания с частотой (Ввых в целое число раз (и=2, 3, 4, ...) меньшей частоты ю входного сигнала: й)бых = ш/и. Всем способам деления частоты свойственна многозначность фазы выходного колебания. Поясним это на примере. Пусть в какой-то схеме произошло деление частоты входного напряжения е=Е cos a>t в 3 раза так, что Ывых1=6бых cos( - <--ф1) и моменты достижения е=Е и Ывых, =11/вых, совпали. При этом ф1=0, как показано на рис. 5.14. В случае я=3 существует еще два других колебания Ывыхг и Ывыхз . отличающиеся от Ывых, значением начальных фаз (ф2=2л/3 и фз=4л/3) и также характеризующиеся тем, что Ывых=вых в те моменты времени, года е=Е. При включении ЭДС е на вход делителя частоты выходное напряжение может соответствовать любому из этих решений. Итак, для я=3, существует три возможных стационарных значения фазы ф выходного колебания, различающихся на Лф=2л/3. В общем случае деления в п раз существует п возможных стационарных значений фазы ф, различающихся на величину Дф=2я/и. Такой вывод соответствует выражению для ф1 в сноске на с. 219. В ряде случаев небезразлично, какое из этих напряжений имеет место. Например, если Иных используется в последующем для создания импульсов в моменты -lBt/X перехода Ивых через нулевой уровень, моменты появления импульсов при различных значениях ф окажутся различными. Поэтому нередко задача получения Ывых с опре-целенной фазой ф и предотвращения перехода фазы к дру.-ому ее значению становится весьма важной. 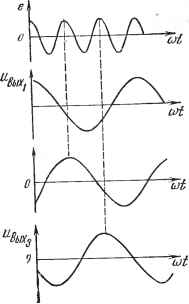 Рнс. 5.14 5.7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ Система фазовой автоподстройки частоты ФАПЧ является системой автоматического регулирования, с помощью которой частота генератора может быть установлена равной эталонной частоте э вспомогательного источника колебаний. В отличие от систем синхронизации, основанных на непосредственном воздействии синхронизирующего сигнала на автогенератор, рассмотренных в предыдущем параграфе, система ФАПЧ, структурная схема которой приведена на рис. 5.15, содержит устройство (дискриминатор), вырабатывающее сигнал ошибки; этот сигнал воздействует на управляющий элемент (управитель частоты УЧ), корректирующий частоту подстраиваемого генератора озо. В качестве дискриминатора используется фазовый детектор ФД, напряжение Ыф на выходе которого зависит от разности фаз эталонного ЭГ и подстраи- ваемого ПГ генераторов. Управителем частоты служит варикап или управляемый реактивный НЭ. В ИСХ0Д1Н0М состоянии частота ПГ о выбирается близкой к соэ-Напряжение Ыф создает на выходе фильтра нижних частот ФНЧ, вводимого в схему для подавления нежелательных составляющих, управляющее напряжение %, под действием которого управитель частоты вносит в контур ПГ корректирующую расстройку. При достаточной величине Ыу происходит полная компенсация первоначальной расстройки генераторов и устанавливается стационарный режим, при котором частота ПГ оказывается равной частоте Юэ- Рис. 5.15 Рис. 5.16 Система ФАПЧ может использоваться для стабилизации частоты ПГ от высокостабильного ЭГ, в качестве узкополосного следящего усил!ителя ЧМ и ФМ колебаний, для деления и умножения частоты (если частоты соэ и о различаются приблизительно в целое число раз) и т. п. Обратимся к более подробному рассмотрению системы ФАПЧ. Будем считать, что в качестве дискриминатора используется балансный ФД (рис. 3.50) с характеристикой, приведенной на рис. 3.516. Характеристику (3.110) такого ФД можно записать Ф = С/ (Ф), (5.58) где Um - наибольшее значение выходного напряжения ФД, а максимальное значение F{(p) = l. Если одно из напряжений много меньше другого (например, f/2<f/i), то из (3.109) : /Сд t/i (1 -f cos ф j, в . t/i 1 - cos ф). и согласно (3.110) и (5.58) можем записать Um=KaU2 и F{(p)=oos(p. (5.59) В качестве ФНЧ применяют РС-фильтры. В теории ФАПЧ в качестве характеристики фильтра используют операторный коэффициент передачи К{р), получающийся заменой ico на р= - в выражении для комплексного коэффициента передачи /C(ift)) = = UylU. Для широко используемого в системах ФАПЧ интегрирующего фильтра (рис. 5.16) иу = иф1{\+\(аШ), а потому /С(р) = 1/(1-ЬрГ), (5.60) где T=\RC-постоянная времени фильтра. Управитель частоты характеризуется модуляционной характеристикой, т. е. зависимостью создаваемой им корректирующей расстройки от напряжения % на его входе. Для линейной модуляционной характеристики с крутизной 5уч (О-сйс(= 5учЫу, (5.61) где а - текущая частота подстраиваемого генератора. Общее дифференциальное уравнение системы ФАПЧ запишем в операторной форме для текущей разности фаз ф колебаний ПГ и ЭГ РФ=d(pldt=(Оэ-со. Преобразуя это выражение рф=соэ-соо-( -соо) и используя соотношения иу=К(р)иф=игпК{р)Р{ц,) и (5.61), получаем дифференциальное уравнение ФАПЧ в операторной форме Рф-1-Й/С(р) (Ф)=(0э-(Оо, (5.62) в котором Й=5уч[/то обозначает максимальную расстройку ПГ, которую могут осуществить ФД и УЧ. Уравнение (5.62) означает, что текущая разность частот генераторов (соа-со) отличается от начальной их расстройки (соа-соо) на величину расстройки QK{p)F(qi), вносимой в подстраиваемый генератор системой ФАПЧ. Деля все слагаемые (5.62) на Q и обозначая относительную начальную расстройку генераторов через у= ( э-coo)/Q, получаем дифференциальное уравнение системы ФАПЧ в безразмерной форме pcelQ+K{p)F{ce)=y. (5.63) Синхронным режимом системы ФАПЧ называется такой, при котором частота ПГ со=соэ, р=0 и ф=ф°=соп81. В этом режиме на выходе ФД устанавливается постоянное напряжение f/ф, в ФНЧ /С(0) = 1, а потому уравнение (5.63) примет вид F(q,o)=y. (5.64) На рис. 5.17а построена левая [соответствует (5.59)] и правая (линия на уровне у) части уравнения (5.64) и графически определены стационарные значения ф°. На интервале -яФя получаем два решения: фь где производная /(ф)>0, и фг, где F{(pO) <0. Исследование устойчивости этих решений можно вести анали-тичесни, составив уравнение вариаций для нелинейного уравнения (5.63). Обратимся к простейшему случаю отсутствия ФНЧ, когда К{р) = 1 и система согласно (5.63) описывается уравнением первого порядка . 4.4?=Т-(Ф). (5.65) ii at Рассмотрим процесс на фазовой плоскости (рис. 5.176), принимая в качестве переменных ф иНаправление перемеще-
|
|||||||||||||||||||