
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока ГЛАВА ВТОРАЯ ЭЛЕКТРИЧЕСКИЕ МИКРОДВИГАТЕЛИ § 2.1. ОБЩИЕ СВЕДЕНИЯ И КЛАССИФИКАЦИЯ Электрические микродвигатели, применяемые в схемах автоматики, телемеханики, вычислительной техники и др., имеют номинальную механическую мощность от сотых долей ватта примерно до 750 Вт. По конструкции и принципу действия их подразделяют на коллекторные, асинхронные и синхронные. Коллекторные микродвигатели бывают: а) постоянного тока; б) переменного тока; в) универсальные, способные работать как от сети постоянного, так и переменного тока. По конструкции якоря коллекторные микродвигатели постоянного тока делятся на три типа: с барабанным якорем, с полым немагнитным якорем и с дисковым якорем. Наряду с микродвигателями со скользящим контактом коллектор - щетки распространены и бесконтактные микродвигатели постоянного тока. Асинхронные микродвигатели в системах автоматического регулирования применяют трех конструктивных вариантов: с короткозамкнутым ротором типа беличьей клетки , с полым немагнитным ротором, с полым магнитным ротором. Синхронные микродвигатели используют в тех случаях, когда требуется строгое постоянство скорости вращения. Из них наиболее распространены в системах автоматики реактивные, гистерезисные, с активным ротором. Значительная часть электрических микродвигателей, используемых в автоматических системах и приборах, играет роль исполнительных силовых элементов. Исполнительными называют электрические двигатели, преобразующие подводимый к ним электрический сигнал (напряжение управления) в угловую скорость вращения (или перемещение) вала. Эти двигатели предназначены для различных функциональных преобразований. В зависимости от устройства они могут работать либо в режиме непрерывного вращения, либо в шаговом режиме. В качестве исполнительных используют двигатели постоянного тока независц- мого возбуждения, двухфазные асинхронные, совмещенные асинхронные двигатели-усилители и синхронные шаговые. Область применения каждого исполнительного двигателя определяется особенностями систем автоматического регулирования и управления, их назначением, условиями работы й требованиями, предъявляемыми к двигателям как элементам схемы. Основные требования, предъявляемые к исполнительным двигателям: 1) статическая устойчивость и линейность механических характеристик во всем рабочем диапазоне скоростей; 2) линейная зависимость скорости вращения ротора от электрического сигнала управления и широкий диапазон регулирования скорости; 3) отсутствие самохода (явление самохода состоит в том, что двигатель продолжает развивать вращающий момент и его ротор продолжает вращаться -при снятом сигнале управления); 4) высокое быстродействие; Б) малая мощность управления при значительной механической мощности на валу, т. е. высокий коэффициент усиления по мощности (требование вызвано ограниченной мощностью источников сигнала управления, в основном электронных). Вспомогательными называкпг электрические двигатели, выполняющие вспомогательные функции в автоматических системах и приборах (привод во вращение отдельных узлов, механизмов й т. а.). В качестве вспомогательных используют двигатели постоянного тока, универсальные коллекторные, однофазные и трехфазные асинхронные, синхронные двигатели непрерывного вращения. Требования, предъявляемые к микродвигателям в -зависимости от области применения, приведены в § В.2. § 2.2. ИСПОЛНИТЕЛЬНЫЕ МИКРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. КОНСТРУКЦИЯ и ПРИНЦИП ДЕЙСТВИЯ Б качестве исполнительных микродвигателей постоянного тока используют, как уже отмечалось, микродвигатели со скользяищм контактом коллектор - щетки и бесконтактные с транзисторными коммутаторами. Исполнительные микродвигатели с барабанным якорем не имеют принципиальных конструктивных отличий от классической машины постоянного тока (их конструкция в настоящей книге отдельно не рассматривается). Микродвигатели с полым немагнитным и дисковым якорями малоинерционные] На рис. 2.1, а изображен микродвигатель постоянного тока элект-ромагнитного возбуждения с полым немагнитным якорем. Особенностью конструкции является то, что для уменьшения момента инерции якорь разделен на две части: обмотку с коллектором и сердечник. Наиболее массивная часть - сердечник неподвижен. Он называется внутренним статором 3 и служит магнитопроводом. Якорь 2 выполняют в виде полого пластмассового цилиндра, в который запрессована обмотка из медного провода или на поверхности которого нанесена печатная обмотка. На внешнем статоре / расположена сосредоточенная обмотка возбуждения. Полый якорь вращается в воздушном зазоре между внешним и внутренним статорами. Напряжение на якорь подается через щетки 5 и коллектор 4. В результате у такого двигателя момент инерции якоря значительно меньше момента инерции якоря барабанного типа. , 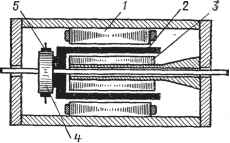 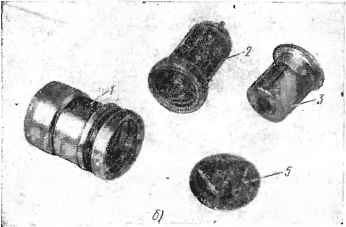 Рис. 2.1. Схема конструкции малоинерционного микродвигателя постоянного тока электромагнитного возбуждения с полым немагнитным якорем {а) и двигатель ЗДПРС магнитоэлектрнче-ского возбуждения (6) Подобные микродвигатели могут быть и с магнитоэлектрическим возбуждением. На рис. 2.1, б показан двигатель ЗДПРС, внутренний статор 3 которого представляет собой цилиндрический постоянный магнит с радиальной намагниченностью, создающий поток возбуждения. Внешний статор h выполненный из магнитномягкого материала, является магнитопроводом. Двигатели постоянного тока с дисковым якорем выполняют не с цилиндрическим воздушным зазором, а с плоским [81. Якорь
|