
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока щения ротора, т. е. регулируется самой машиной. Благодаря этому бесконтактный двигатель постоянного тока в основном сохраняет характеристики коллекторного двигателя с независимым возбуждением. Рассмотрим простейшую конструкцию бесконтактного двигателя (рис. 2.4), у которого статор / имеет односекционную обмотку 2, а ротор 3 с одной парой полюсов, выполненный из постоянного магнита. При подаче постоянного напряжения на зажимы обмотки статора по ней течет ток, который во взаимодействии с магнитным потоком ротора создает вращающий момент. Роль датчика положения ротора, т. е. оси магнитного потока, выполняют два трансформаторных датчика и Д, расположенных на фланце корпуса, и ферромагнитный диск 4, насаженный на вал ротора. Диск имеет вырез вдоль окружности. Поскольку выходные обмотки датчиков соединены по дифференциальной схеме, датчик вырабатывает сигнал при перекрытии двух из трех стержней трансформатора, т. е. при нахождении против датчика выреза диска. В положении, изображенном на рис. 2.4, сиг- нал, управляющий транзисторным коммутатором 5, снимается с датчика Д и коммутатор подает на обмотку статора напряжение указанной на чертеже полярности. Когда сигнал снимается с датчика Да, коммутатор подает на обмотку статора напряжение противоположной полярности. Согласованная работа датчиков и коммутирующей схемы имеет место при расположении датчиков Д и Да по оси обмотки статора, а линии симметрии диска СС перпендикулярно оси полюсов ротора. При этом изменение коммутатором полярности напряжения обмотки статора осуществляется в момент перехода оси потока ротора через ось обмотки статора, т. е. обеспечивается изменение направления тока в обмотке статора и магнитного потока статора при подходе оси полюса ротора противоположного знака (рис. 2.5). Значит, сохраняется одно направление вращающего момента М в пределах полного оборота ротора, т. е. выполняется роль коллектора электрической машины постоянного тока. Поскольку вращающий момент такого двигателя создается в результате взаимодействия магнитных потоков статора Фс и ротора Фр, величину вращающего момента можно записать как векторное произведение потока М=йФсФрБ1П е, где 6=0 - 180° - угол между осями потоков; k - конструктивный коэффициент. Магнитный поток ротора Фр постоянный, а поток Фо при ненасыщенном магнитопроводе прямо пропорционален току /о в обмотке статора. Тогда выражение момента можно преобразовать; M=kJcSin е, где fe - коэффициент, зависящий от потока ротора и конструктивных параметров статора. Согласно принципу работы двигателя и полученному выражению момента при включении напряжения ротор двигателя не приходит во вращение, если начальное положение ротора соответствует углу О, при котором вращающий момент М меньше момента сопротивления на валу. Кроме того, имеет место существенная пульсация величины вращакмцего момента в пределах оборота ротора и соответственно пульсация мгновенной скорости вращения ротора. Наличие достаточно большого пускового момента при любом угловом положении ротора, снижение пульсаций вращающего мо- 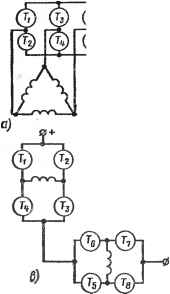 1 (Ь d) I-.- TIT 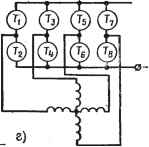 Рис. 2.6. Схемы соединения обмоток бесконтактных микродвигателей постоянного тока ента в пределах оборота и пульсаций мгновенной скорости вращения ротора обеспечивается в том случае, если силовая обмотка статора состоит из нескольких секций, сдвинутых в пространстве на определенный угол. При этом уменьшение момента взаимодействия ротора с одной из секций компенсируется увеличением момента взаимодействия с другой. Существуют следующие многосекцйонные силовые обмотки статора бесконтактных микродвигателей: а) замкнутые (рис. 2.6, а); б) с параллельным подключением секций к источнику (2.6, б); в) с последовательным подключением секций к источнику (2.6, в); г) с лучевым соединением секций (2.6, г). Выражение электромагнитного момента в этом случае принимает -iiccsfo-- OJB C,2  где e - межкоммутационный интервал; О < 6 < 9. При увеличении числа секций 6 стремится к нулю, а момент М - к постоянному значению, характерному для классической коллекторной машины. Нестабильность скорости вращения ротора определяется как отношение максимального перепада скорости в пределах оборота к ее среднему значению: дг < гаах - <Omln i , (О , Величина нестабильности зависит от числа секций обмотки статора, схемы их соединения, существенно возрастает в области малых значений со и обратно пропорциональна моменту инерции ротора. На рис. 2.7 изображены характеристики нестабильности скорости трехсекционного двигателя при замкнутой (кривая 1) и параллельной (кривая 2) схемах соединения обмоток. Для повышения стабильности момента и скорости в пределах оборота применяют специальные схемы модуляции напряжения или тока в секциях обмотки статора. Сравнительный анализ бесконтактных микродвигателей с различными схемами обмоток показывает, что: 1) наибольшей к. п. д., наименьший вес, наилучшее использование активных материалов, наименьшую нестабильность скорости обеспечивают замкнутые, обмотки, так как у них в каждый момент времени все секции наиболее полно участвуют в электромагнитном взаимодействии с ротором; наиболее близки к ним обмотки с последовательным подключением секций к источнику и лучевые; 2) наиболее простые по устройству коммутаторы в двигателях с параллельным подключением секций к источнику. Характеристики бесконтактных микродвигателей тем ближе к характеристикам классического коллекторного двигателя постоянного тока, чем больше число секций силовой якорной обмотки на статоре. Однако пропорционально числу секций увеличивается необходимое число чувствительных элементов датчиков положения и число транзисторов в коммутаторе, усложняется конструкция сигнальных элементов датчиков и коммутатора. Поэтому практически число секций нецелесообразно более трех-четырех. Весовые и габаритные показатели бесконтактных микродвигателей могут быть несколько хуже, чем у других микродвигателей постоянного тока, в основном из-за веса и объема коммутатора. 0 0,4 OjS DJ3 Рис. 2.7. Характеристики нестабильности скорости бесконтактного двигателя (Шо - скорость идеального холостого хода)
|