
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока в качестве исполнительных используют микродвигатели постоянного тока с возбуждением от постоянных магнитов (магнитоэлектрическим) и с независимым электромагнитным возбуждением. Основные характеристики этих микродвигателей отличаются мало, поскольку магнитный поток в обоих случаях практически не зависит от режима работы машины. Преимущ[ество двигателей с постоянными магнитами состоит в том, что они не требуют источника питания обмотки возбуждения и их магнитный поток очень мало зависит от температуры двигателя, в то время как в двигателях с электромагнитным возбуждением при изменении температуры меняется, сопротивление и ток обмотки главных полюсов и, следовательно? основной магнитный поток. У исполнительных микродвигателей с постоянными магнитами к. п. д. более высокий, чем у аналогичных микродвигателей с электромагнитным возбуждением, ввиду отсутствия потерь на возбуждение. Поэтому при одинаковых размерах и величине перегрева от них можно получить большую механическую мощность. Недостаток микродвигателей с постоянными магнитами состоит в старении магнитов, что можно не допустить, используя новые высококачественные магнитнотвердые материалы. Кроме того, высока стоимость магнитнотвердых материалов для полюсов. Исполнительные микродвигатели постоянного тока имеют сравнительно высокий к. п. д.: он может достигать 40-5-50% у микродвигателей мощностью в десятые доли и единицы ватт соответственно и 70-4-75% при мощности в десятки и сотни ватт. Меньший к. п. д. у микродвигателей меньшей мощности обусловлен в основном относительным ростом сопротивления обмотки якоря и потерь в ней. Габа-ритььи вес в среднем в 2ч-4 раза меньше, чем у одинаковых по мощности исполнительных асинхронных микродвигателей. На рис. 2.8 приведены значения к. п. д. и веса на единицу развиваемой мощности q- некоторых серийных исполнительных микродвигателей постоянного тока. У микродвигателей постоянного тока со скользящим контактом коллектор - щетки в результате искрения под щетками создается спектр высокочастотных электромагнитных колебаний, которые являются радиопомехами. При питании двигателя от автономного источника пульсации э. д. с. и тока в якоре приводят к появлению высших гармоник тока и напряжения, что отрицательно сказывается на работе других приемников, подключенных к этому же источнику. . Практически применяют два метода борьбы с указанными вредными явлениями: экранирование и установка электрических фильтров. Экранирование эффективно при защите от радиопомех, вызываемых искрением. Экраном обычно служит корпус двигателя с металлическим кожухом, охватывающим коллектор со щетками. Все электрические выводы выполняют из экранированного провода, наруж- 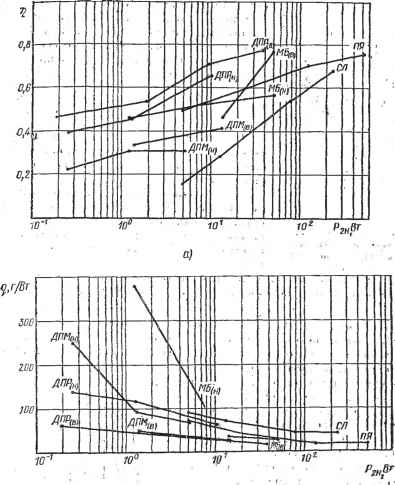 ;,\ i 6) . . . Рис. 2.8. Зависимости к. п1 д. (а) и веса (б), на единицу номинальной мощности от номинальной мощности исполнительных микродвигателей постоян-, ного (гока: СЛ - с барабанным якорем и электромагнитным возбуждением: ДПМ - с барабанным-якорем и магнитоэлектрическим {юзбуждением; ДПР-с полным немагнитным .якорей и магнитоэлектрическим возбуждением; Я, - с дисковым якорем и магнитоэлектрическим возбуждением ( .3000 обмин); МБ - бесконтактные с магиитоэлектрическим возбуждением- Г(й) - номинальная скорорть~2500 .вб/мин, (В) - номинальная ско рость 9000 o6/mhhJ 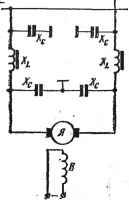 Рис. 2.9. Схема П-об-раэного фильтра для подавления радиопомех ную оплетку которого соединяют электрически с корпусом машины. Электрические фильтры в цепи якоря подавляют наиболее опасные высшие гармоники тока и напряжения в питающей сети, свободно пропуская постоянную составляющую. Для исполнительных микродвигателей постоянного тока применяют схемы Г- н П-образ-ного (рис. 2.9) фиJьтpoв. В особо важных схемах используют комбинированные многозвенные фильтры. § 2.3. СПОСОБЫ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МИКРОДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА Для регулирования скорости вращения ротора исполнительных микродвигателей постоянного тока используют два основных вида управления: I) непрерывное управление, т. е. непрерывным во Бремени и меняющимся по величине сигналом. Сигналом может быть напряжение на обмотке якоря (якорное управление) или на обмотке главных полюсов (полюсное управление); 2) импульсное управление, т. е. изменением времени, в течение которого к двигателю подводится номинальное напряжение. Якорное управление Магнитный поток возбуждения Ф (Вб) создается током, протекающим по обмотке возбуждения главных полюсов (рис. 2.10, а), либо постоянными магнитами (рис. 2.10, б). В первом случае обмотка возбуждения постоянно подключена к независимому источнику питания с напряжением (/д (в вольтах), равным номинальному для двигателя (т. е. Ф= const). Регулирование скорости вращения ротора со (рад/с) осуществляют, изменяя напряжение управления и у на зажимах якоря. При анализе приняты допущения об отсутствии насыщения магнито-провода и реакции якоря. Анализ якорного управления начнем с получения уравнений механических и регулировочных характеристик. Эти уравнения принято рассматривать в относительных единицах: в=(/у/(7в - коэффициент сигнала (для двигателей с постоянными магниТгаш a=UyJU , где U -номинальное напряжение двигателя). 
Рис. 2.10. Схемы включения исполнительных микродвигате-дяей постоянного тока при якорном управлении
|