
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока Величина в процессе управления может изменяться в диапазоне 0-ь1,25; co*=co/o>o - скорость, где - скорость идеального холостого хода при а=1; М=М/М - момент, где М - пусковой момент при а=1. Из общей теории коллекторных электрических машин постоянного тока [1] известно уравнение механической характеристики двигателя с параллельным возбуждением, т. е. при а=1 ю=ю--. (2.1) где скорость идеального холостого хода ==. . (2.2) В выражениях (2.1) и (2.2): М -вращающий момент двигателя, Н-м; -сопротивление обмотки якоря. Ом; k - конструктивный коэффициент, зависящий от числа проводников в обмотке якоря, числа пар параллельных ветвей а и числа пар полюсов р машины: k=-, (2.3) Для исполнительного микродвигателя с якорным управлением при произвольном а уравнение (2.1) с учетом (2.2) принимает вид Делим правую и левую части уравнения (2.4) на (а,: =6)3=а---М. (2.5) .Находим выражение пускового момента при а=1 из (2.4), приравнивая О) нулю: М =-№. . (2.6) Подставляем (2.6) в (2.5) и после преобразований получаем o) =a -М . (2.7) При постоянном коэффициенте сигнала а выражение (2.7) является уравнением механической характеристики o)*=/(M исполнительного двигателя с якорным управлением, а при постоянном моменте - уравнением регулировочной характеристики a)*=/(a). Из уравнения (2.7) следует, что механические и регулировочные характеристики при якорном управлении линейны. Эти характеристики приведены на рис. 2.11, Механические характеристики (рис. 2.11, а) обеспечивают . статическую устойчивость работы микродвигателя при якорном управлении во всем диапазоне скоростей (йЗ=0-г-1. Жесткость механических характеристик (отношение приращения момента к приращению скорости) остается неизменной при любом коэффициенте сигнала. Максимальный вращающий момент двигатель развивает при пуске. Величина пускового момента в относительных единицах равна коэффициенту сигнала (из 2.7): Mt=a, (2.8) т. е. пусковой момент прямо пропорционален напряжению управления. Якорный способ управления обеспечивает линейную зависимость скорости вращения ротора от напряжения управления при любом статическом моменте нагрузки на валу (рис, 2.11,6). Следует отметить, что регулировочная характеристиканенагружен- 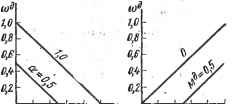  о 0 C,t 0,6 0,6 1,0 mS о о/ 0,4 0,6 Ofi 1,0 а. 0 Ь) 6} Рис 2.11. Механические (а) и регулировочные (б, в) характери-. , стики исполнительного микродвигателя с якорным управлением ноге микродвигателя (рис. 2.11, в) начинается от нуля только в идеальном случае (пунктирная линия), когда механические потери в двигателе равны нулю. У реальных исполнительных двигателей в режиме холостого хода (х.х) ротор начинает вращаться при определенном напряжении управления, отличном от нуля (сплошная линия), которое называют напряжением трогания V. Величина 11, зависит от момента трения в двигателе и определяет зону нечув-отвительности. Для исполнительных микродвигателей как постоянного, так и переменного тока величина t/,. не должна превышать 5% t/ . Диапазон регулирования скорости составляет порядка (1:10)-(1:20) от номинальной. Для описания исполнительного микродвигателя как звена какой-либо системы принято вводить ряд коэффициентов. .Коэффициент внутреннего демпфирования йд, характеризующий величину и знак собственного демпфирующего момента, развиваемого двигателем при изменении скорости вращения ротора, равен производной от момента по скорости в данной точке или тангенсу угла наклона характеристики Ж ==/(©): k=dM/doi. (2.9) Величина модуля определяет жесткость рассматриваемого унастка механической характеристики. t На устойчивом участке механической характеристики коэффициент внутреннего демпфирования всегда отрицательный. Это означает, что демпфирующий момент противоположен по знаку приращению скорости и стремится погасить его. Чем ближе значение к положительной области, тем хуже статическая устойчивость двигателя. Величина Ад не зависит от скорости вращения ротора при линейных механических характеристиках и не зависит от напряжения управления при постоянной жесткости механических характеристик. При якорном управлении исполнительным микродвигателем постоянного тока йд определяют из выражения (2.7): Как видно из (2.10), величина и знак кд не зависят от скорости и коэффициента сигнала. Коэффициент пропорциональности между пусковым моментом и напряжением управления K==dMJdUy. (2.11а) Для якорного управления он определяется из выражения (2.8) k -=dMJda=l (2.116) и не зависит от коэффициента сигнала. Статический коэффициент усиления для исполнительных микродвигателей kyc=d(i)/dUy. (2.12а) При линейной регулировочной характеристике этот коэффициент постоянен и численно равен тангенсу угла наклона характеристики. В случае якорного управления из выражения (2.7) получаем ky=d(oyda=l. (2.126) Здесь статический коэффициент усилия не зависит от момента на валу двигателя. Полезная механическая мощность исполнительного микродвигателя Ра, Вт=М, (2.13) где уМг -полезный момент на валу, который меньше вращающего момента М на величину момента холостого хода, соответствующего потерям мощности на трение и в магнитопроводе. В двигателях постоянного тока создается, как известно, за счет электрической мощности, потребляемой якорем. При якорном управлении эта мощность является мощностью управления и составляет от 80 до 95% от всей потребляемой мощности Р (меньшие цифры относятся к двигателям меньшей мощности). Мощность управления Ру, BT=UyJy (2.14) возрастает пропорционально увеличению коэффициента сигнала и момента нагрузки на валу. Значительная мощность управления - недостаток якорного способа, поскольку возникает необходимость в мощных источниках сигнала управления (электронных, магнитных усилителях и т. д.).
|