
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока Мощность, потребляемая обмотками главных полюсов, является при якорном управлении мощностью возбуждения (2.15) где R - сопротивление обмотки главных полюсов. Эта мощность неизменна при любом коэффициенте сигнала, не зависит от нагрузки и вся выделяется в виде тепловых потерь. Ввиду высокого относительно якоря сопротивления обмотки главных полюсов мощность возбуждения составляет незначительную долю в полной потребляемой мощности Р: Pi=Py+P.. (2.16) Якорное управление исполнительными микродвигателями постоянного тока обеспечивает невозможность возникновения самохода. При снятом сигнале управления ток якоря, а следовательно, и вращающий момент равны нулю, и ротор останавливается. Полюсное управление При полюсном управлении исполнительными микродвигателями обмоткой управления служит обмотка главных полюсов, а на обмотку якоря постоянно подается номинальное напряжение от неза. Vi=const 4>J Vy=VOLr 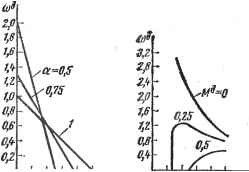 O,Z0fi-O,S0,81ft М9 Рис. 2.12. Схема включения исполнительного микродвигателя постоянного тока при полюсном управлении Рис. 2.13. Механические (а) и регулировочные (б) характеристики исполнительного микродвигателя с полюсным управлением висимого источника питания (рис, 2.12). Это напряжение играет роль напряжения возбуждения Ug. Управление скоростью якоря осуществляется за счет изменения напряжения управления Uy на зажимах обмотки главных полюсов. При анализе характеристик принимаем: магнитная система двигателя не насыщена, реакция якоря отсутствует. Магнитный поток машины Ф изменяется пропорционально напряжению управления. Для произвольного коэффициента сигнала поток Фи =аФ, где Ф - значение потока при а=1. Тогда на основании (2.1) и (2.2) получаем уравнение механической характеристики в абсолютных единицах при полюсном упрас-лении и. ю=---М=--М. (2 17) (аАФ) Делим правую и левую части уравнения (2.17) на Og и преобрэ-вуем полученное выражение с учетом (2.6): (2.18) При постоянном значении коэффициента сигнала а выражение (2.18) является уравнением механической характеристики, а при постоянном значении -уравнением регулировочной характеристики исполнительного микродвигателя с полюсным управлением. Механические и регулировочные характеристики, соответствующие полюсному управлению и рассчитанные по (2.18), представлены на рис. 2.13. Из анализа уравнения (2.18) следует, что механические характеристики (рис. 2.13. а) при полюсном управлении линейны. Коэффициент внутреннего демпфирования в соответствии с (2.10) и (2.18) Ад=-а (2.19) и имеет отрицательное значение при любом коэффициенте сигнала (рис. 2.14, с). Значит, статическая устойчивость работы двигателя -В,5 о,г o/t OjS ofi 1,0 0)9 ес=0,5  =1,0 Л) Рис. 2.14. Коэффициенты внутреннего демпфирования (а) и усиления (б) исполнительного микродвигателя с полюсным управлением обеспечена при любом напряжении управления во всем рабочем диапазоне скоростей. С уменьшением коэффициента сигнала устойчивость снижается. Одновременно уменьшается и жесткость механических характеристик. Величина пускового момента в относительных единицах равна как и при якорном управлении, коэффициенту сигнала, т. е. прямо пропорциональна напряжению управления. Коэффициент пропорциональности пускового момента kn=l. Регулировочные характеристики (см. рис. 2.13, б) при полюсном управлении нелинейны. При малом моменте нагрузки они неоднозначны, т. е. одна скорость соответствует двум значениям коэффициента сигнала. Неоднозначность исчезает и несколько повышается линейность только при значениях момента > 0,5. Статический коэффициент усилия при полюсном управленииявляется нелинейной функцией коэффициента сигнала (рис. 2.14,6), поскольку его выражение в соответствии с (2.12) и (2.18) имеет вид . 2JVP-a (2.20) Особенность регулировочных характеристик микродвигателей с полюсным управлением состоит также в том, что скорость идеального холостого хода {М~0) стремится к бесконечности при стремлении коэффициента сигнала к нулю. В реальном двигателе эта скорость ограничена, так как к валу всегда приложены моменты трения щеток по коллектору, в подшипниках и ротора о воздух. Однако при малом значении этих моментов скорость может значительно превысить допустимую для микродвигателя по механической прочности (разнос микродвигателя). Вращающий момент б этом случае, когда напряжение управления равно нулю, создается за счет взаимодействия потока остаточного магнетизма полюсов и тока в якоре. Следовательно, при полюсном управлении теоретически возможен самоход. Если момент сопротивления на валу окажется больше, чем вращающий момент от потока остаточного магнетизма, то ротор остановится. Мощностью управления служит мощность, потребляемая обмоткой главных полюсов, Ру. Bt=uI/R , (2.21) которая обычно составляет не более 5-20% от полной мощности, потребляемой двигателем. Проведенный анализ схем включения и характеристик позволяет сравнить непрерывные способы управления исполнительными микродвигателями постоянного тока. Преимущества якорного управления: 1) линейность и однозначность регулировочных характеристик при любом значении момента; 2) постоянство статического коэффициента усиления; 3) постоянн1ая жесткость механических характеристик при различных значениях сигнала управления; 4) более высокое значение коэффициента внутреннего демпфирования при произвольном напряжении управления, что обеспечивает
|