
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока меньшее время протекания переходных электромеханических процессов (разгона, реверса и т. д.); 5) ток через щеточный контакт проходит только при вращении ротора, что предотвращает пригорание коллектора от местного нагрева при неподвижном якоре; 6) индуктивность обмотки якоря значительно меньше индуктивности обмотки главных полюсов (меньше число витков), что обеспечивает более высокую скорость электромагнитных переходных процессов; 7) невозможность самохода. При полюсном управлении по сравнению с якорным требуется значительно меньшая мощность управления. Благодаря значительным преимуществам якорный способ управления используют в большинстве схем. Как отмечалось, уравнения механических и регулировочных характеристик исполнительных микродвигателей постоянного тока были получены без учета реакции якоря. В реальной машине линейность механических и регулировочных характер1стик нарушается вследствие размагничивающего действия реакции якоря. Жесткость механических характеристик исполнительных микродвигателей постоянного тока снижается по мере уменьшения их мощности, так как при этом относительно увеличивается сопротивление обмотки якоря. В заключение отметим некоторые особенности механических и регулировочных характеристик бесконтактных исполнительных микродвигателей постоянного тока при якорном управлении. У этих микродвигателей коммутирующая секция обмотки якоря имеет значительно большее число витков, чем в коллекторных машинах со скользящий контактом и при выводе уравнений механических и регулировочных характеристик следовало бы учитывать э. д. с. самоиндукции в коммутирующей секции. Однако большинство бесконтактных микродвигателей имеет магнитоэлектрическое возбуждение. Постоянный магнит ротора обладает низкой магнитной проницаемостью и, следовательно, индуктивность секций обмотки якоря будет незначительной. Вследствие этого механические и регулировочные характеристики сохраняются практически линейными, как у коллекторных микродвигателей. В случае применения у таких микродвигателей электромагнитного возбуждения э.д. с. сглюиндукции коммутирующей секции может вызвать существенную нелинейность характеристик. Импульсное управление В маломощных системах автоматического регулирования получает распространение импульсный способ управления исполнительными микродвигателями [7]. Сущность импульсного способа состоит в том, что регулирование скорости вращения ротора достигается не за счет изменения напряжения управления, непрерывно подводимого к якорю двигателя, а путем изменения времени, в течение кото- рого подводится номинальное напряжение. Иначе говоря, при импульсном управлении к микродвигателю подводятся импульсы неизменного по амплитуде напряжения управления L/y , в результате чего его работа состоит из чередующихся периодов разгона и тор-рложения. Если эти периоды малы по сравнению с полным временем разгона и остановки ротора, то скорость вращения ротора о не успевает к концу каждого периода достигать установившихся значений и установится t>r сиУса, ср некоторая средняя скорость (йср. Величина (йср при неизменных моменте нагрузки и напряжении возбуждения однозначно определяется относительной продолжительностью включения Рис. 2.15. Графики скорости при импульсном управлении где - длительность импульса; Т - период (рис. 2.15). С увеличением относительной продолжительности импульсов скорость вращения якоря растет. При импульсном управлении мгновенное значение скорости вращения ротора непрерывно колеблется в определенных пределах. Амплитуда колебаний тем меньше, чем больше отношение электромеханической постоянной двигателя (характеристики инерционности двигателя) к периоду следования импульсов. С ростом частоты управляющих импульсов и с увеличением электромеханической постоянной времени амплитуда колебаний скорости уменьшается. Среднее значение скорости остается при этом неизменным. Для того чтобы скорость вращения ротора однозначно определялась величиной относительной продолжительности импульсов, в перибд отключения (паузы t ) ротор должен тормозиться. Возможно применение как механического, так и электрического торможения. Если это условие не будет выполняться, то скорость вращения ротора при любом значении т будет непрерывно увеличиваться, пока не достигнет значения скорости холостого хода, так как во время импульса скорость будет возрастать, а во время паузы оставаться практически неизменной. При неизменной относительной продолжительности импульсов т среднее значение скорости будет зависеть от величины момента нагрузки и величины напряжения возбуждения. Объясняется это тем, что с изменением момента нагрузки и напряжения возбуждения изменяется установившееся значение скорости вращения ротора. Таким образом, импульсный способ управления позволяет путем изменения относительной продолжительности импульсов в широких пределах регулировать среднюю скорость вращения ротора. Основными схемами импульсного регулирования являются схемы, в которых управляющие контакты электромагнитных реле (рис. 2.16, а) или бесконтактное ре- ле (транзистор на рис. 2.16, в) в течение одной части цикла подключают якорь непосредственно к источнику цитания, создавая положительный момент (разгон), в течение же другой части отключают якорь от источника питания (схема применяется в случае механического торможения) или переключают якорь на сопротивление 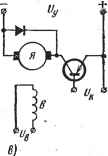 Рис. 2.16. Схемы включения исполнительных микродвигателей постоянного тока при импульсном управлении /?д для осуществления динамического торможения (рис. 2.16, б). Рассмотрим механические и регулировочные характеристики исполнительного микродвигателя постоянного тока при импульсном регулировании по схеме рис. 2.16, с с торможением за счет статического момента сопротивления Л1 на валу. Под механической характеристикой микродвигателя понимают зависимость установившейся средней скорости вращения от статического момента сопротивления при неизменной относительной продолжительности импульсов т. Под регулировочной характеристикой понимают зависимость установившейся средней скорости вращения от относительной продолжительности импульсов т при неизменном статическом моменте на валу двигателя. При малой амплитуде колебаний мгновенной скорости в процессе регулирования можно пренебречь изменением вращающего момента микродвигателя в интервале t. В этом случае в периоды разгона Аш и торможения Ао изменение скорости вращения ротора происходит по линейному закону и определяется соотношениями: Mi-м1 где Мер - среднее в интервале значение вращающего момента двигателя в относительных единицах; Жст - статический момент сопротивления на валу в относительных единицах; / - момент инерции якоря; с =Л1п/(йц - постоянная машины.
|