
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока в установившемся режиме t =Г Значение Мер, соответствующее установившейся средней скорости сор, определяем из выражения (2.7) при а=1, так как амплитуда импульсов равна номинальному напряжению управления: Mfp=l-<. Полученное выражение подставляем в (2.22) и после преобразования получаем <=1-- <2-23) Выражение (2.23) представляет собой при T=const уравнение механической характеристики, а при Mtr = const - уравнение регу- 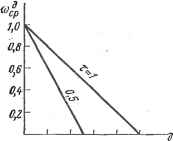 ff,Z 0,t 0,6 0,В 7,0 а) 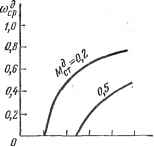 Q,Z 0,4 0,6 0,8 IfiX S) Рис. 2.17. Механические (а) и регулировочные (б) характеристики исполнительного микродвигателя постоянного тока при импульсном управлении лиррвочной характеристики. Анализ выражения (2.23) позволяет сделать ряд выводов. 1. Механические характеристики (рис. 2.17, а) линейны и начинаются из одной общей точки холостого хода ((йср=1, Л1ст = 0). Жесткость механических характеристик уменьшается по мере уменьшения т. 2. Регулировочные характеристики (рис. 2.17,6) нелинейны. Регулирование возможно только при Мст>0, так как при Мст=0 установившееся значение средней скорости р==1 при любом т. 3. Условием пуска микродвигателя ( срО) является неравенство r>ML Аналогичным образом можно исследовать механические и регулировочные характеристики любой другой схемы импульсного управления. Следует отметить, что в схемах ч; электрическим торможением микродвигателя во время пауз может быть достигнута большая линейность регулировочных характеристик. Основным преимуш,еством импульсного способа управления является меньшая величина средней мощности управления за счет уменьшения среднего во времени тока управления. Однако аппаратура управления в общем случае более сложная, чем при непрерывном управлении, так как в схемах автоматического управления сиг-пал чаще всего непрерывный и его нужно преобразовывать в систему импульсов. Импульсный способ весьма удобен для управления бесконтактными микродвигателями постоянного тока, имеющими в комплекте транзисторный коммутатор. § 2.4. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ИСПОЛНИТЕЛЬНЫХ МИКРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА У исполнительных микродвигателей постоянного тока скорость электромагнитных переходных процессов значительно выше, чем электромеханических. Поэтому динамические свойства исполнительного микродвигателя при переходных процессах можно исследовать с помощью уравнения равновесия моментов M=M +J , dt (2.24) где М - вращающий момент двигателя; М - статический момент сопротивления на валу; J - момент инерции якоря. Для упрощения анализа принимаем. [ =0. Тогда M=J-. (2.25) 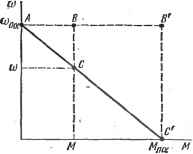 Рис. 2.18. Механическая характеристика исполнительного микродвигателя постоянного тока при произвольном значении коэффициента сигнала а Из выражения (2.25) видно, что изменение скорости вращения ротора О) во времени определяется законом изменения вращающего момента от скорости, т. е. механической характеристикой. Рассмотрим механическую характеристику исполнительного микродвигателя постоянного тока при произвольном значении коэффициента сигнала а (рис. 2.18). На этой характеристике берем текущую точку С с координатами: момент М и скорость о. Из подобия треугольников ABC и АВС получаем JJl, (2 26) где Юоа и Мпа - знзуения скорости холостого хода и пускового момента при коэффициенте сигнала а. Решаем уравнение (2.26) относительно М, подставляем в (2.25)-и получаем дифференциальное уравнение движения ротора J.+fi,=o) . (2.27) При якорном управлении согласно уравнению (2.7) £000=амо (2.28) Л1па=аМ . (2.29) Теперь уравнение (2.27) принимает вид М dt В случае полюсного управления значение Мпо можно определить также из выражения (2.29), а значение ща - из (2.18): £0оа=-Со- 2-31 Подставляем (2.29) и (2.31) в (2.27) и получаем + , = а-!. (2 32) М dt а Из уравнений (2.30) и (2.32) видно, что исполнительный микродвигатель постоянного тока является апериодическим звеном первого порядка, если за входную величину принять коэффициент сигнала а, а за выходную - скорость вращения ротора со. Коэффициент при производной от скорости в этих уравнениях есть постоянная времени, определяющая быстродействие микродвигателя. Поскольку эта постоянная зависит в основном от механических параметров, ее называют электромеханической постоянной времени микродвигателя Г . Электромеханическая постоянная времени - это время, в течение которого ротор ненагруженного двигателя, обладающий моментом инерции J, разгоняется от неподвижного состояния до скорости идеального холостого хода при неизменном вращающем моменте, равном пусковому. При якорном управлении определяется выражением Tu=J. (2-33) а при полюсном На основании выражений (2.33) и (2.34) можно сделать вывод: электромеханическая постоянная времени прямо пропорциональна
|