
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока равен наружному диаметру подшипников. Это позволяет обрабатывать внутреннюю поверхность статора и отверстия под подшипники в подшипниковых щитах с одной установки на станке. Тем самым уменьшается эксцентриситет расположения ротора в расточке статора, чтр дает возможность снизить минимально допустимую величину воздушного зазора до 0,03-0,05 мм. Уменьшение воздушного зазора при неиз- 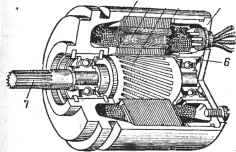 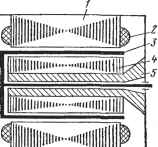 Рис. 2.24. Исполнительный асинхронный микродвигатель сквозной конструкции с короткозамкнутым ротором топа беличьей клетки : /-сердечник статора; 2 - ебмотка статора; 3 - ротор; 4j-корпус; $- подшипниковый щит; 5-подшипники; 7 -вал Рис. 2.25. Схема конструкции исполнительного асинхронного микродвигателя h с полным немагнитным ротором менных габаритах и величине магнитного потока обеспечивает снижение намагничивающего тока, а следовательно, уменьшение электрических потерь в статоре и повышение к. п. д. и коэффициента мощности созф!- И наоборот, при неизменных габаритах, намагничивающей составляющей м. д. с. статора и электрических потерях в обмотке статора, т. е. при одинаковых условиях нагрева двигателя, уменьшение воздушного зазора дает возможность увеличить основной магнитный поток (при отсутствии насыщения) и тем самым вращающий момент. С целью уменьшения электромеханической постоянной времени разработаны и широко применяются в схемах автоматики малоинерционные исполнительные асинхронные микродвигатели с полым немагнитным ротором. Схема конструкции такого микродвигателя пред-.ставлена на рис. 2.25. Внешний статор / ничем не отличается от статора обычного асин--Хронного микродвигателя. Его набирают из листов электротехнической стали, изолированных друг от друга. В пазах статора располагают две обмотки 2 - возбуждения и управления, сдвинутые в пространстве на 90° (электрических). Внутренний статор 4, который набирают из листов электротехнической стали на цилиндрическом Выступе 5 одного из подшипниковых щитов, служит для уменьшения магнитного сопротивления на пути основного магнитного потока, проходящего через воздушный зазор. 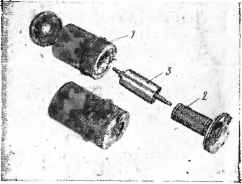 Рис. 2.26. Исполнительный асинхронный микродвигатель с полым немагнитным ротором АДП-123: / - внешний статор; 2 - внутренний статор; 3 - ПОЛЫЕ немагнитный ротор В воздушном лззоре яежду внешним и внутренним статорами находится полый ротор 3, выполненный в виде тонкостенного стакана из немагнитного материала, чаше всего из сплавов алюминия. Дно ротора жестко укрепляют на валу, который врашается в подшипниках, расположенных в подшипниковых щитах. Толщина стенок ротора в зависимости от мощности двигателя колеблется в пределах 0,2-1 мм. Полый ротор имеет очень малую массу и, следовательно, незначительный момент инерции. Это обеспечивает высокое быстродействие двигателя. В микродвигателях мощностью в единицы ватт и менее обмотки возбуждения и управления часто размещают в пазах внутреннего статора. Тогда внешний статор пазов не имеет и служит лишь для уменьшения магнитного сопротивления. При такой конструкции облегчается процесс укладки обмоток в пазы и несколько повышается вращающий момент но увеличивается диаметр ротора вследствие увеличения обмоточного пространства на внутреннем статоре, что приводит к некоторому увеличению момента инерции ротора. Чтобы это не допустить, иногда одну из обмоток размещают на внутреннем, а другую на внешнем статоре. На рис. 2.26 представлен исполнительный микродвигатель АДП-123 с полым немагнитным ротором и обмотками возбуждения на внешнем статоре. Полый немагнитный ротор исполнительного асинхронного микродвигателя в отличие от роторов других типов обладает незначительным индуктивным сопротивлением, что повышает линейность механических и регулировочных характеристик двигателя. Гладкая цилиндрическая поверхность полого немагнитного ротора способствует снижению уровня шумов, создаваемых двигателем. Малый вес и отсутствие радиальных сил притяжения полого немагнитного ротора к статору обеспечивают некоторое уменьшение момента трения в подшипниках и соответственно сигнала трогания. Недостатком микродвигателя с полым немагнитным ротором: является большой немагнитный зазор, состоящий из двух воздушных зазоров: между внешним статором и ротором и между ротором и внутренним статором (каяадый до 0,25 мм), а также из немагнитной стенки самого ротора. Из-за большого немагнитного зазора, общая величина которого между внешним и внутренним статорами составляет 0,51,5 мм, эти двигатели имеют значительный намагничивающий ток (0,8-=-0,9 номинального) и низкий коэффициент мощности. Последний недостаток несколько уменьшается при конденсаторном управлении, но большая величина намагничивающего тока приводит к большим электрическим потерям в обмотках двигателя и значительно снижаетегок. п. д. У исполнительных микродвигателей с полым немагнитным ротором мощностью в несколько десятков ватт по сравнению с исполнительными микродвигателями той же мощности с ротором типа беличьей клетки к. п, д. снижается с 40-50% до 20-*-35%, а габариты и вес увеличиваются в 1,2-ь-2 раза. При увеличении номинальной частоты напряжения питания с 50 до 400--1000 Гц габариты и вес на единицу полезной мощности несколько уменьшаются и эти показатели у указанных типов микродвигателей сближаются. Объясняется это относительным уменьшением активного сопротивления обмоток статора (по сравнению с индуктивным) и электрических потерь в них. На рис. 2.27 приведены зависимости к. п. д. т] и веса на единицу номинальной мощности q от номинальной мощности некоторых серийных исполнительных асинхронных микродвигателей. Микродвигатели с полым немагнитным ротором менее надежны при высоких температурах, вибрации и ударах, так как вероятность деформации полого немагнитного ротора в указанных условиях выше, чем ротора типа беличьей клетки . Уменьшить немагнитный зазор можно при использовании полого ферромагнитного ротора. В этом случае отпадает необходимость во внутреннем статоре, так как магнитный поток замыкается непосредственно по ротору. Чтобы материал ротора не насыщался и активное сопротивление его не было очень велико,-полый стакан выполняют более толстостенным. Это обусловливает увеличение массы ротора и снижение быстродействия двигателя. У некоторых типов таких микродвигателей с целью уменьшения активного сопротивления ротора поверхность ротора покрывают гальваническим путем тонким слоем меди [23]. Принцип действия исполнительного асинхронного микродвигателя не отличается от принципа действия трехфазного асинхронного микродвигателя [1. Вращающееся магнитное поле статора создается в результате взаимодействия м. д. с. обмоток В и У при наличии пространственного сдвига между ними и временного сдвига прилол н-ных к ним напряжений. Из теории электрических машин [11 известно, что величина вектора вращающегося магнитного поля остается неизменной, т. е. поле является круговым при соблюдении следующих условий: 1) сдвиг обмоток статора в пространстве на угол у=90° (электрических); 2) сдвиг токов в обмотках статора по времени на угол р=90°; , 3) равенство м. д. с. обмоток возбуждения и управления; где W - число витков соответствующей обмотки; feo6 - обмоточный коэффициент.
|