
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока где ай=аотр - эффективный коэффициент сигнала при круговом поле. В соответствии с изложенньм, различают два основных вида пуска асинхронных микродвигателей: при круговом поле и при максимальном пусковом моменте. При заданнил величине пускового момента М=М использование во время пуска емкости С позволяет уменьшить пусковой сигнал управления в п раз. Общая по- требляемая мощность возрастает при этом в раз [5,27]. Рассмотренные способы управления обеспечивают весьма широкий диапазон регулирования скорости вращения ротора. У исполнительных микродвигателей с полым немагнитным ротором он достигает .(1:100) -(1:200). Наиболее распространенными в схемах автоматики являются амплитудный, фазовый и амплитудно-фазовый способы управления. Механические и регулировочные характеристики исполнительных асинхронных микродвигателей в относительных единицах при Sk>1 для этих способов управления .представлены на рис. 2.35 и 2.36 ((o.f=(o,/cOi = 1 - s; М/Ли)- Анализ механических характеристик по уравнению момента (2.51) показывает, что при всех способах управления характеристики нелинейны и их жесткость уменьшается с уменьшением сигнала управления. Степень нелинейности механической характеристики - это отношение максимального расхождения по моменту Д/Иах между действительной характеристикой и прямолинейной, проходящей через точки скорости холостого хода и пускового момента, к величине пускового момента, т. е. ДЛ-тах/Лп (рис. 2.35, а). Повышению линейности механических характеристик способствует увеличение активного сопротивления ротора и в меньшей степени уменьшение индуктивного сопротивления рассеяния обмоток статора и ротора. Однако, как известно, увеличение активного сопротивления ротора ухудшает энергетические показатели двигателя. Поэтому у исполнительных асинхронных микродвигателей, работающих в системах автоматики, допускается нелинейность порядка 10%. Как видно из рис. 2.35 и 2.37, наиболее линейными являются характеристики при фазовом управлении; причем жесткость характеристик практически не меняется при изменении коэффициента сигнала. Наименее линейны механические характеристики при амплитудно-фазовом управлении. При всех способах управления механические характеристики устойчивы во всем диапазоне двигательного режима и с уменьшением коэффициента сигнала смещаются в сторону меньших моментов и скоростей. Вращающий момент и меха-ическая мощность, развиваемые двигате51ем, получаются наиболь-ими при амплитудно-фазовом управлении. Это объясняется тем, что при увеличении скорости вращения ротора конденсаторного микродвигателя несколько увеличивается напряжение и магнитный поток обмотки возбуждения и соответственно вращающий момент двигателя по сравнению с моментом при амплитудном и фазовом 0,4- 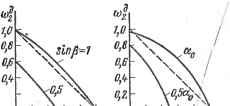 о л/ 0,4 0 о1& им О 0,г 0,4 Ofi 0,8 7,0 Ml о 0,Z 0,4 0,6 0,8 Ifi Рис. 2.35. Механические характеристики исполнительного асин- хрониого микродвигателя при управлении: с -амплитудном; б - фазовом; в - амплитудно-фазовом 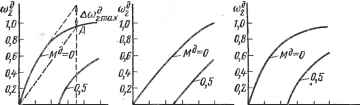 О О/ 0,4 0,6 0,8 Dig О 0 0,4 0,6 0,8 sLnfi О Of. 0,4 0,6 С/ а/а а.) Ь) 6) Рис. 2.36. Регулировочные характеристики исполнительного асинхронного микродвигателя при управлении; с-амплитудном; б - фазовом; е - амплитудио-фазовом А О -0,5 4,0 0,г 0,4 0,6 0,8 1,0 wl : cXg=0,5 -0,5 -----7.0 1 I 1 I-L. 0,Z 0,4 Of OjR 7,0 w 0,Z 0,4 0,6 0 Ifi uil Kopccg  Рис. 2.37. Зависимости коэффициента внутреннего демпфирования от скорости и коэффициента сигнала при различных способах управления; а- амплитудном; с - фазовом;, в - амплитудно-фазовом 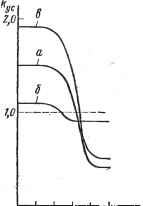 управлении. Недостатком амплитудно-фазового управления является некоторое снижение устойчивости в области малых скоростей. Анализ регулировочных характеристик (рис. 2.36) показывает, что при \всех способах управления они в общем нелинейны. Степень нелинейности наибольшая? в режиме холостого хода и зависит в основном от тех,же параметров двигатеня, что и нелинейность механических характеристик. Ближе всех к линейным характеристики микродвигателя с фазовым управлением, затем следуют амплитудный и амплитудно-фазовый способы (рис. 2.38). При амплитудно-фазовом управлении (конденсаторном) степень нелинейности можно изменять в определенном диапазоне путем соответствующего выбора емкости конденсатора, т. е. воздействуя на эллиптичность магнитного поля. Линейность регулировочных характеристик повышается при усилении эллиптичности поля. Поэтому наибольшую линейность и крутизну характеристики имеют в начальной части. Для обеспечения линейности регулирования двигатель должен работать при малых сигналах и относительных скоростях, Уменьшение относительных скоростей наиболее эффективно достигается повышением рабочей частоты напряжения питания двигателя, так как при этом пропорционально повышается синхронная скорость. Количественно степень нелинейности регулировочных характеристик оценивают следующим образом (рис. 2.36, а). Прямая, проходящая через точки характеристики =0 и = 2Л где ш - скорость, соответствующая максимальному значению сигнала, определяет линейный закон регулирования. Степень нелинейности регулировочной характеристики - это отношение максимального расхождения по скорости AtOj между действительной и линейной регулировочными характеристиками к скорости в рассматриваемой точке А, т. е. ак/гл- Р нелинейности механических характеристик меньше 10% степень нелинейности регулировочной характеристики холостого хода не превышает 20% в диапазоне изменения коэффициента сигнала 0-0,7. Величина пускового момента при всех способах управления прямо пропорциональна сигналу управления и в относительных единицах равна эффективному коэффициенту сигнала. Мощностью возбуждения является мощность, потребляемая цепью обмотки возбуждения микродвигателя: Р =[/Лсо5ф (2.58) о 0 0,if 0,6 0,8 1,0 org а/<х Рис. 2.38. Зависимости коэффициента усиления от коэффициента сигнала при различных способах управления: а - амплитудном; б - фазовом; в - ймплитулно-фазовом
|