
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока практически не зависит от величины сигнала и Г можно определить по формуле 7м=. (2.63> Электромеханическая постоянная времени реальных микро-двигателе1 может быть несколько меньше, чем рассчитанная по (2.62) и (2.63). Это объясняется нелинейностью механической характеристики, в результате чего значение врашаюшего момента при одинаковой скорости больше, чем при линейном законе. С увеличением частоты питающей сети / и уменьшением числа пар полюсов р постоянная Г возрастает, так как синхронная скорость изменяется по закону (о=2л-. Основные меры по уменьшению 7 и увеличению быстродействия исполнительных асинхронных микродвигателей следующие: 1) снижение момента инерции ротора; например, применение полого немагнитного ротора; 2) увеличение пускового момента за счет совершенствования конструкции, уменьшения воздушного зазрра; например, применение сквозной конструкции двигателей. Сравнение по быстродействию исполнительных асинхронных микродвигателей с полым немагнитным ротором и с ротором типа беличьей клетки наиболее целесообразно проводить при одинаковых мощности на валу, уровне суммарных потерь на единицу поверхности корпуса, характеризующем нагрев двигателя, степени нелинейности характеристик и частоте питающей сети [5,271. Как следует из (2.60), соотношение Г рассматриваемых микродвигателей при одинаковой скорости вращения прямо пропорционально отношению моментов инерции ротора и обратно пропорционально отношению пусковых моментов. Момент инерции полого немагнитного ротора значительно меньше, чем ротора типа беличьей клетки того же диаметра и длины. Однако у роторов типа беличьей клетки допустимое по механической прочности отношение длины к диаметру больше, чем у тонкостенных полых немагнитных роторов, консольно закрепленных на валу. Значит, при неизменной величине поверхности, необходилюй для проведения основного магнитного потока, диаметр ротора типа беличьей клетки и его момент инерции могут быть уменьшены за счет увеличения длины. , Пусковой момент при отсутствии насыщения магнитопровода и прочих равных условиях может быть получен больше у микродвигателей с ротором типа беличьей клетки за счет меньшей величины воздушного зазора (см. § 2.6). Указанные факторы определяют сравнительные параметры быстродействия исполнительных асинхронных микродвигателей. В диапазоне мощностей в единицы и доли ватт при относительно небольпшх габаритах и массе ротора у двигателей сквозной конструкции с ро- тором типа беличьей клетки можно получить меньшую постоянную времени Т, чем при полом немагнитном роторе. Среди двигателей большей мощности преимущество по быстродействию в основном имеют двигатели с полым немагнитным ротором. При частоте 400 Гц 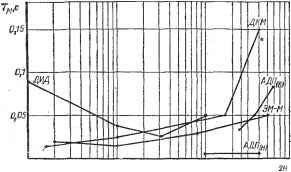 P2H.Br Рис. 2.41. Зависимости постоянной Гм от номинальной мощности исполнительных асинхронных гателей микродви- н круговом магнитном поле у двигателей мощностью 10--20 Вт с полым немагнитным ротором величина лежит в пределах 0,015ч-0,15 с, а с ротором типа беличьей клетки - в пределах 0,05-ь1,5 с. На рис. 2.41 приведены показатели быстродействия некоторых серийных исполнительных асинхронных микродвигателей (условные обозначения по ркс. 2.27). § 2.9. СИНХРОННЫЕ МИКРОДВИГАТЕЛИ НЕПРЕРЫВНОГО ВРАЩЕНИЯ Синхронные микродвигатели, выполненные по классическому типу синхронной машины с электромагнитным возбуждением и пусковой обмоткой типа беличьей клетки , имеют наиболее оптимальные рабочие и пусковые характеристики. Однако такие микродвигатели практически не применяют в автоматических устройствах и приборах малой мощности, где энергетические характеристики не являются решающими. Основные причины заключаются Б следующем: 1) для работы микродвигателя необходимо два источника питания: переменного и постоянного тока; 2) скользящий контакт кольца - щетки снижает надежность микродвигателя и усложняет его конструкцию; 3) требуется специальная пусковая схема, отключающая на период разгона обмотку возбуждения ротора от источника постоянного тока и подключающая ее к внешнему сопротивлению. В схемах автоматики, приборах и бытовых устройствах малой мощности наибольшее распространение получили бесконтактные синхронные микродвигатели, к которым не относятся-перечисленные недостатки. В зависимости от конструкции ротора, устройство и ма-териал-f которого в значительной мере определяют природу возникновения электромагнитного момента и рабочие свойства, эти микродвигатели можно подразделить на три типа: 1) с постоянными магнитами (активного типа); 2) реактивные; f 3) гистерезисные. Статор этих микродвигателей не отличается от статоров обычных синхронных и асинхронных машин; его выполняют наборным из листовой электротехнической стали. В пазах статора располагают трех- 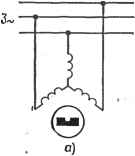 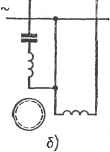 Рис. 2.42. Схемы включения микродвигателей: - трехфазного о пгастояниыми магнитами; б - вднофаз-ноге гистерезиснвгв фазную или двухфазную распределенную обмотку, создающую вращающееся магнитное поле (рис. .2.42). Общим свойством рассматриваемых в настоящем параграфе микро-двигагелей является равенство в синхронном режиме скорости вращения ротора и первой гармоники магнитного поля статора. Микродвигатели с постоянными магнитами (активного типа] Ротор микродвигателей с постоянными магнитами состоит из двух основных частей: а) постоянных магнитов, создающих магнитный поток возбуждения ротора и обеспечивающих возникновение электромагнитного момента в синхронном режиме; б) корпткозамкнутой обмотки типа беличьей клетки , уложен- 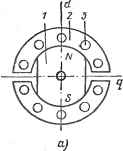 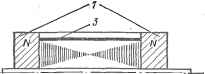 V77, Рис. 2.43. Схемы конструкции роторов синхронных микродвигателей с постоянными магнитами: у-поотоявные магниты; 2 -сердечник из электротехнической стали; S - стержни короткозамкиутой обмотки
|