
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока НОИ в сердечник из электротехнической стали и обеспечивающей возникновение электромагнитного момента в процессе асинхронного пуска. Наиболее распространенными являются роторы с радиальным (рис. 2.43, а) и аксиальным (рис. 2.43, 6) расположением постоянных магнитов и короткозамкнутой обмотки. Электромагнитный момент создается в результате взаимодействия вращающегося поля статора с полем возбуждения ротора. Величина электромагнитного момента синхронного микродвигателя в синхронном режиме в случае симметричной магнитной цепи и незначительном активном сопротивлении обмотки статора определяется уравнением, известным из обшей теории синхронных машин активного типа [Ц: Mc=-sin9 (2.64) где nil - число фаз обмотки статора; U-i - фазовое напряжение на зажимах обмотки статора; - э. д. с, наводимая магнитным потоком ротора в фазе обмотки статора; - синхронное индуктивное сопротивление обдютки статора; 1й, = 2п---угловая синхронная скорость; f-частота напряжения сети; р - число пар полюсов обмотки статора; 9 - временной угол между векторами 0 и £д. Угол В численно равен пространственному (в электрических градусах) углу между просг-ранственной волной напряжения статора и поперечной осью q ротора. Величина угла е в синхронном режиме зависит от момента сопротивления на валу двигателя. Угловая характеристика, соответствующая уравнению (2.64), изображена на рис. 2.44 (сплошная линия). В реальных синхронных микродвигателях с постоянными магнитами магнитная система несимметрична: индуктивные сопротивления обмотки статора по продольной Х и поперечной осям машины не равны. Это наглядно выражено у микродвигателей радиальной конструкции (рис. 2.43, а), в которых магнитное сопротивление ротора по продольной оси d больше, чем по поперечной q, вследствие малой магнитной проницаемости материала постоянных магнитов / по сравнению с электротехнической сталью 2. 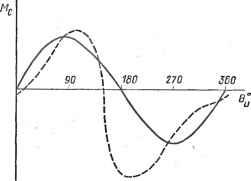 Рис. 2.44. Угловая характеристика синхронного микродвигателя с постоянными магнитами Активное сопротивление обмотки статора Ri синхронных микродвигателей в отличие от синхронных двигателей большой мощности соизмеримо с индуктивными сопротивлениями и Х. Поэтому существенная часть потребляемой мощности теряется на сопротивлении Ri- Оба указанных фактора обусловливают изменение величины электромагнитного момента М. и характера его зависимости от угла Q [321. Основной является составляющая момента, соответствующая взаимодействию полей статора и ротора. (rii R, {2Xl-XaX,+R\) (X,Xa+R\y cos 9 пост R, - ( X,X,+R\f m,El R, {Xl+R\) При /?1=0 выражение для момента Мое обращают в (2.64). Появляется постоянная составляющая момента <0г (XX,+R]y пропорциональная потерям мощности в обмотке статора от токов, наведенных в ней потоком ротора. Неравенство индуктивных сопротивлений по продольной и поперечной осям вызывает появление постоянной M,. ..=-i.f(Ml. (2.65а) и переменной + RAX, + Xa)cos2Q] (2.656) составляющих Момента, получивших название реактивных При Хд-Ха обе составляющие равны нулю. Постоянные составляющие момента МпостК, и Мр. ост имеют знак минус, т. е. являются тормозными. Результирующий электромагнитный момент синхронного микродвигателя с постоянными магнитами в общем случае представляет собой сумму всех этих составляющих: - М, = Месн + Лпост/?, + ЛР. пост-Ь.Мр. пер . (2.66) На рис. 2.44 (пунктирная линия) изображена угловая характеристика синхронного микродвигателя радиальной конструкции, соответствующая уравнению (2.66). В случае работы микродвигателей в системах синхронной связи часто требуется знать зависимость момента от угла -у между осью 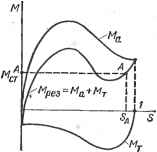 м. д. с. (или потока) статора и продольной осью ротора. Пересчёт угловой характеристики к новым осям можно производить по методике, изложенной в [321. Следует отметить, что угловая характеристика Мс=[{Уэ) также является несинусоидальной, но при углах Уэ=0 и 180 момент Мс==0 (Уэ - угол у Б электрических градусах). При прочих равных условиях момент тем больше, чем больше э. д. с. Ео, т. е. чем сильнее магнитный поток ротора. У синхронных микродвигателей с постоянными магнитами применяют асинхронный метод пуска, т. е. в процессе разгона ротора до скорости, близкой к синхронной, двигатель работает как асинхронный. Вращающееся магнитное поле статора во взаимодействии с токами, наведенными этим полем Б короткозамкнутой обмотке ротора, создает асинхронный вращающий момент Ма (рис. 2.45). Особен-нодть пуска таких микродвигателей по сравнению с двигателями с электромагнитным возбуждением заключается в том, что он происходит при наличии потока возбуждения ротора. Этот поток при вращении ротора наводит в обмотках статора э. д. с, частота которой не равна частоте сети. Под действием э. д. с. в цепи обмоток статора протекают токи, которые во взаимодействии с вызвавшим их потоком ротора создают тормозной момент М, направленный встречно к асинхронному вращающему моменту Мд. На результирующей механической характеристике Mps-fis) появляются провалы, которые ухудшают условия пуска. Например, при моменте сопротивления на валу Мста (рис. 2.45) ротор будет вращаться со скоростью, соответствующей скольжению sa- Эта скорость далека от синхронной и синхронизация ротора с полем статора не наступит. Следует огметить, что в синхронном режиме (s=0) момент является рассмогренной составляющей электромагнитного момента Лпостк,. Для уменьшения тормозного момента необходимо снижать степень возбужденности постоянных магнитов ротора, т. е. уменьшать отношение EJUi. Оптимальной является такая возбужденность постоянных магнитов ротора, которая обеспечивает наилучшие характеристики в синхронном режиме при заданных пусковых характеристиках. Рис. 2.45. Механическая характеристика синхронного микродвигателя с постоянными магнитами в асинхронном режиме (S- скольжение) Реактивные микродвигатели Синхронными реактивными называют микродвигатели с переменным вдоль окружности воздушного зазора магнитным сопротивлением и невозбужденным рогором. Вращающееся магнитное поле таких
|