
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока 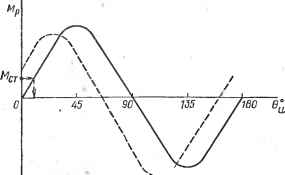 Рис. ,2.50. Угловая характеристика синхронного реактивного микродвигателя Пересчет угловой характеристики Mp=/(0J к аргументу у можно произвести по формуле [29] e =arctg ifii! Ьcos у, Xd cos Уэ--?1 sin уэ . - где Уэ=Р-угол в электрических градусах. Угловые характеристики Л1р=/(Уэ) несинусоидальны, но при углах уз=0. 90 180 и 270° момент Mp=0. При неравенстве скоростей ротора и поля угол 9 становится периодической функцией времени и среднее значение реактивного момента равно нулю. Поэтому у синхронных реактивных микродвигателей применяют асинхронный метод пуска. В качестве пусковой служит либо обмотка типа беличьей клетки (см. рис. 2.46, а к б), либо алюминиевые части ротора (см. рис. 2.46, в). В двигателях с ротором, изображенным на рис. 2.46, б, сохранение полного комплекта стержней обмотки приводит к улучшению пусковых свойств, в частности к повышению момента входа в синхронизм. У реактивных микродвигателей в процессе пуска вследствие изменения магнитного сопротивления появляется переменная составляющая магнитного потока, наводящая добавочную э. д. с. в обмотке статора. Как у двигателей с постоянными магнитами, создается тормозной момент Ж.- Однако влияние этого момента на пусковые свойства реактивного микродвигателя обычно значительно слабее, так как ротор невозбужденный. В синхронном режиме момент Л1т=Л1р.пост- Синхронные реактивные микродвигатели имеют невысокие энергетические показатели. Причиной низкого значения коэффициента мощности с05ф является то, что магнитный поток реактивного микродвигателя создается исключительно намагничивающим током статора, который имеет индуктивный характер. Увеличению намагничивающего тока способствует повышенное сопротивление магнитной цепи из-за наличия впадин на роторе (/?м>мй)- Соответственно низок и к. п. д. реактивных двигателей за счет значительных электрических потерь мощности в обмотках статора. Таким образом, усиление неравенства магнитных и индуктивных сопротивлений по осям d п q способствует увеличению момента см. формулу (2.67а}], но ухудшает энергетические характеристики двигателя. Практически у синхронных реактивных микродвигателей отношение ширины полюсной дуги ротора к полюсному делению выполняют примерно равным (0,5-!-0,€), а максимального воздушного зазора к минимальному - (IO-j-12). Гистерезисные микродвигатели Синхронным гистерезисным называют микродвигатель (рис. 2.51), вращающий момент которого возникает за счет явления гистерезиса при перемагничивании ротора. Ротор гистерезисно-го двигателя выполняют из магнитнотвердого материала с широкой петлей гистерезиса (ви-каллой, альни). Причем в целях экономии дорогостоящего магнитно-твердого материала ротор делают сборным (рис. 2.52). При определенном соотношении между толщиной кольца / из магнитнотвердого материала и диаметра ротора достигаются оптимальное по намагничиванию использование материала и наилучшие энергетические показатели. Для выяснения природы гистерезисного момента рассмотрим физические процессы, происходящие в роторе описанной конструкции при асинхронном вращении, т. е. когда материал ротора непрерывно перемагничивается (рис. 2.53). Будем считать, что оси м. д. с. и потоков как в статоре, так и в роторе, совпадают. В момент времени, когда вектор вращающегося магнитного потока статора занимает положение А (рис. 2.53, а), элементарные магнитики ротора ориентируются вдоль этого потока. Силы взаимодействия элементарных магнитиков, например и М, с потоком статора направлены вдоль этого потока и вращающего момента не создают. При перемещении потока статора в положение Б в том же направлении будут поворачиваться и элементарные магнитики (рис. 2.53, б). Однако вследствие явления гистерезисного запаздывания магнитики и не сразу повернутся на тот же угол, что и поток Ф, и между ними образуется угол рассогласования у (угол гистерезисного запаздывания). После этого силы взаимодействия будут 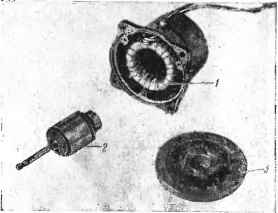 Рис. 2.51. Синхронный гистерезисный микродвигатель Г-201: t - статор с двухфазной обмоткой; 2 - ротор; 3 - подшипниковый шит иметь тангенциальные составляющие F, которые и создадут гисте-резисный момент асинхронного режима М. Возникающий гистере-зисный момент пропорционален векторному произведению пространственных векторов магнитного потока ротора Ф2, образованного элементарными магнитиками, и статора Ф, которые вращаются с одинаковой скоростью со сдвигом по фазе на у: (2.68а) Mk Ф,Ф2]=А;Ф1Ф2 5туг где k - коэффициент, зависящий от параметров машины. Величины потоков Ф и U\ при симметричном, например трехфазном, питании от скорости вращения ротора не зависят. Пространственный угол Уг. на который поток ротора отстает от потока 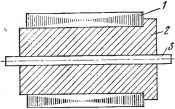 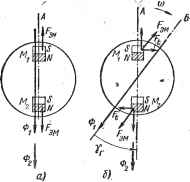 Рис. 2.52. Ротор гистерезисного микродвигателя: ; - кольцо магнитно-вердого материала; 2 - втулка из немагнитного или - агнитномяр- кого материала: 3 - вал Рис. 2.53. Принцип действия гистерезисного микродвигателя статора, также не зависит от скорости вращения ротора и определяется той коэрцитивной силой Н, при которой начинает изменяться направление поля элементарных магнитиков, т. е. определяется формой петли гистерезиса материала ротора. Соответственно  1,0 S 1,0 S Рис. 2.54. Механические характеристики гистерезисного двигателя
|